Paso 7: Sujetando los tendones del dedo
Los tendones fijar el alcance de la mano a los motores y permiten los dedos para accionar, este paso tiene algunas partes muy difíciles debido a los ángulos difíciles y espacios reducidos.
Se necesita:
- Asamblea de mano
- 1m x cadena de tendón (línea de la pesca de tiburón)
- Tijeras
- Pinzas
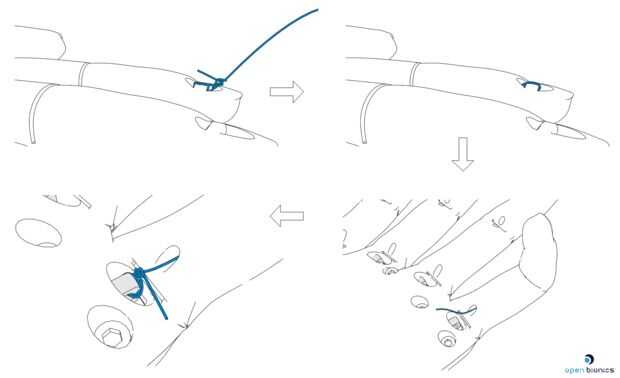
Fijar los tendones a la alcance de la mano
- Corte una longitud de cadena del tendón a 20cm
- Parte de la cadena a través del orificio en la punta del dedo del hilo de rosca
- Utilice unas pinzas para parcialmente tire la cadena del tendón aunque el otro agujero de punta de dedo, por lo que coloca alrededor del punto de terminación
- Pase la cuerda a través del dedo y alrededor del punto de terminación una segunda vez
- Un nudo en la cadena del tendón para garantizar que el punto de fijación del tendón en la punta del dedo, recomienda el uso de múltiples nudos y tire firmemente para mantener segura
- Con un extremo de la cuerda de tendón atado a la punta del dedo, enrosque el otro extremo a través del orificio de punta de dedo, pasando por los canales del tendón en el interior del dedo hasta la palma
- Con la cadena de tendón sale el dedo cerca de la palma, tire la cadena del tendón firmemente mientras sostiene el dedo extendido para tirar el nudo en la punta de los dedos en el interior del dedo
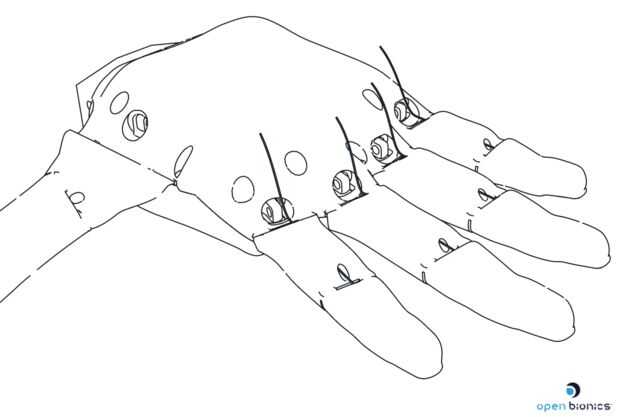
- Repita este paso para todos los dedos y el pulgar
Fijar los tendones a los motores
Ahora debe tener todos los tendones dedo 5 atado a sus dedos y a través de los canales del tendón en el dedo, sale cerca de los agujeros de la bocina del motor.
- Tiene que utilizar las pinzas para enhebrar la cuerda de tendón del canal del tendón del dedo, pasando por el orificio de la bocina motor
- El siguiente paso es hacer un nudo alrededor del cuerno motor (se recomienda que usted ligeramente doblar el dedo durante este proceso para que la posición natural del dedo se flexiona ligeramente)
- Puede que necesite varios nudos para mantener seguros los tendones del dedo
- Repita este proceso para todos los 5 dedos, pero no corte el exceso de cordel todavía
Prueba los tendones
- Encender la mano y ejecutar el ejemplo MotorTest otra vez, para asegurarse de que las posiciones de los dedos un aspecto naturales
- Si los tendones necesitan apretar, deshacer el nudo en los cuernos motor y atar los tendones con los dedos más flexionados
- Si usted está satisfecho con la longitud del tendón puede cortar cualquier cadena de exceso del tendón en la punta de los dedos y en los cuernos motor
Ahora debe tener todos los tendones del dedo a los dedos y los motores.





")

")





