Paso 4: Añadir el Arduino
Un gracias enorme por hacer todo este trabajo duro ya se va a Dan Beaven , quien inspiró mi a probarlo yo mismo.
También sin el trabajo de la Tiranía de llave en mano no tenemos un firmware de trabajo para nuestros Arduinos o el Incscape G-code export plugin - gran trabajo!
Por supuesto también necesitan hablar de los chicos grandes en el Grupo de los fabricantes de Lansing que comenzaron todo este trabajo pionero.
Por lo que no se deje engañar a pensar que hice todo el trabajo duro - ¡ gracias por los de arriba para!
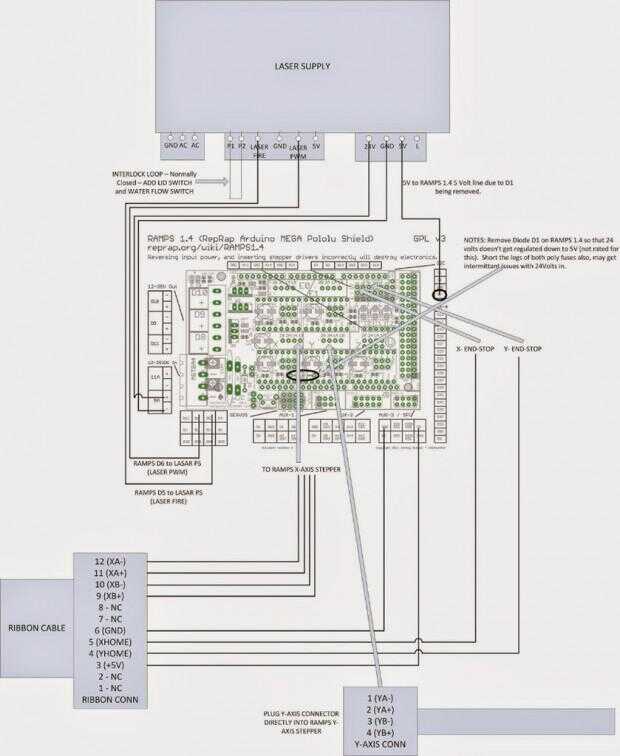
Continuar prepare la placa de rampas por lo que puede atender a 24V.
Compruebe la página de la Wiki , en la sección de alimentación que usted encontrará la ubicación de los diodos D1 y D2 - D1 deben eliminarse!
Los dos grandes, amarillo placas polyfuses y es necesario que les corta con una longitud de cable para que la junta puede manejar adecuadamente el 24V si no te pueden encontrar desconexiones aleatorias.
Si desea conservar por razones de seguridad por favor cámbielos tipos de 30V.
Ahora es hora de conectar todo - no te molestes demasiado en esta etapa para hacer montajes adecuados un tal como todavía plan hacer algunos mods para ser cubierto en otro Ible.
Utilice las imágenes de la última etapa como referencia, su funcionamiento interno puede diferir un poco pero los fundamentos siguen siendo el mismo, incluso si el tuyo tiene un medidor analógico.
En el tablero de rampas es necesario comprobar bajo los drivers si los puentes se configuran correctamente para microstepping 1/64.
Ya que es el máximo que apoyan estos controladores baratos puede poner los 3 puentes allí.
Dending material a mano y habilidades se le o usar conectores o soldar directamente los cables sin los conectores derecha - o me voy a referir solamente como "conexión" en este asunto.
Compruebe este bonito diagrama que dan Beaven hecho como referencia:
En mi caso no se fue cinta cable, dos conectores idénticos para los motores PAP, que me causó un poco de dolor de cabeza al principio.
Sobra el uso de dolor de cabeza lo anterior una s una referencia de la imagen y hace esto:
Los grandes cables entre el controlador y fuente de alimentación son la fuente de alimentación, iniciar con ellos y hacer caso omiso el cable en el "LO" connction - solo necesita 5V, 24V y GND.
Sólo si su láser de alimentación no ofrece un control PWM que todavía necesita el ajuste de la energía y el medidor analógico - además de realizar algunos cambios menores en el firmware (documentado).
A continuación conecte el láser y los cables de señal PWM - si su fuente de alimentación es diferente comprobar placas de circuito impreso para las conexiones correspondientes y utilizarlos.
Ahora no los motores paso a paso y si tienes un cable de cinta para el motor y topes siguen el diagrama de arriba, de lo contrario Conecte el motor y preparan el cable para tirar resistencias o tope.
Si no está seguro acerca de este paso, compruebe este Wiki para los detalles de cableado de las resistencias.
Conectarse los topes rampas tablero, 5V y GND, no importa que 5V terminal o terminal de tierra se utiliza aquí.
Existe la posibilidad que sus motores paso a paso se ejecutarán en la dirección equivocada, si eso sucede en pocas palabras los conectores "marcha atrás".
Que debe ser la electrónica por ahora, pantalla con control de movimiento completo se cubrirá en la siguiente Ible.
")
")





")
")




")