Paso 5: Parte 5: conectar los circuitos


Introducción a los circuitos de información
El aerodeslizador-control-remoto requiere un circuito, con funciones especializadas:
1 el circuito de Arduino: recibe señales desde el control remoto.
Controla los motores coreless dos por el módulo de control de Motor de corriente continua.
Controla la velocidad del motor sin cepillo a través del controlador de velocidad.
2:
• Placa Arduino y motores Coreless acciones el + 9.6V batería DC.
Controlador de velocidad y Motor sin escobillas • comparte la batería DC de V 11.2.
• Placa Arduino proporciona electricidad para el módulo de control de Motor de la C.C. y el módulo inalámbrico.
• El control remoto usa dos pilas AAA.
3.el sistema de elevación consta de un ventilador canalizado (V04 Changesun RC50/11 FED de 50mm) y un variador de 40A.
4 el sistema de hélice contiene un ventilador de cepillo con 55mm 370.
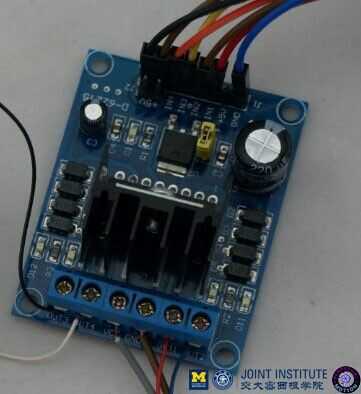
Sistema de control de 5.TheDirection contiene dos motores coreless y un tablero de conductor del motor de CC MH910. Los dos motores coreless son los mismos. Les denotan como MOTOR1 y MOTOR2
Conectar los materiales.
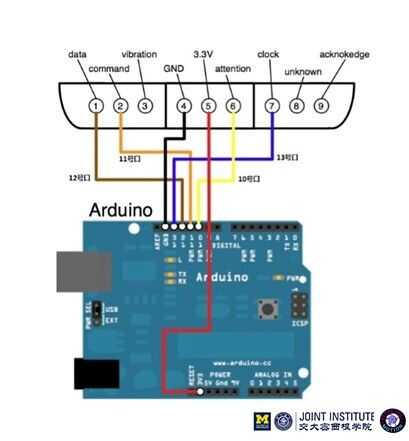
() Conecte el módulo inalámbrico PS2
1. Conecte el pin 1 del módulo inalámbrico para PWM12 de la placa Arduino.
2. Conecte el PIN2 del módulo al PWM11 de la placa Arduino.
3. Conecte el PIN4 del módulo a GND de la placa Arduino.
4. Conecte el PIN5 del módulo a 3.3V de la placa Arduino.
5. Conecte el PIN6 del módulo a PWM10 de la placa Arduino.
6. Conecte el PIN7 del módulo a PWM13 de la placa Arduino.
II. Conecte el sistema de elevación
1. Conecte los enchufes de plátano macho del motor sin escobillas para los enchufes de plátano hembra del control de velocidad.
2. Conecte la T del motor con el tapón de la T de
la batería de 1550mAh.
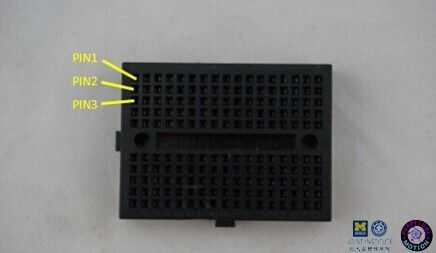
3. Conecte el cable blanco del control de velocidad para PWM8 de Arduino board y el cable negro al pin 1 de la Junta de pan.
4. Conecte el PIN3 del Comité del pan a la tierra de la
Placa de Arduino.
III. Conecte el sistema de hélice
Conecte el enchufe del motor del cepillo a la clavija de la batería amarilla.
IV. Conecte el sistema de control de dirección
1. Conecte + 5V de la tarjeta de conductor a + 5V de la placa Arduino.
2. Conecte VIN de la tarjeta de conductor a la salida + del módulo regulador de voltaje y conectar el GND del lado del VIN para hacia fuera-del módulo regulador de voltaje.
3. Conecte IN + de la tarjeta de conductor al positivo de la batería de 1550mAh y en el negativo de la batería. Utilice un medidor de voltaje para ajustar el módulo regulador hasta que el voltaje de salida es igual a + 7.5V.
4. conectar el GND de los + 5V lado del tablero controlador con el PIN2 de la Junta de pan.
5. Conecte IN1 de la Junta de controlador con PWM7 de la placa Arduino.
6. Conecte IN2 del tablero controlador con PWM4 de la placa Arduino.
7. Conecte el IN3 de la tarjeta de conductor con PWM3 de la placa Arduino.
8. Conecte IN4 de la tarjeta de conductor con PWM2 de la placa Arduino.
9. Conecte el PIN1 del MOTOR1 a OUT1 de la tarjeta de conductor.
10. Conecte el PIN2 del MOTOR1 al OUT2 del tablero de conductor.
11. Conecte el PIN1 del MOTOR2 a OUT3 de la tarjeta de conductor.
12. Conecte PIN2 del MOTOR2 OUT4 de la tarjeta de conductor.
13. Fije la ENA de la tarjeta de conductor al PWM6 de la placa Arduino.
14. fijar ENB el tablero controlador para PWM5 de la placa Arduino.



 by Micrazysoft")








")
. Planos gratis kayak bricolaje, la ferretería barco")