Paso 3: Paso a paso 1: diagrama del circuito del diseño
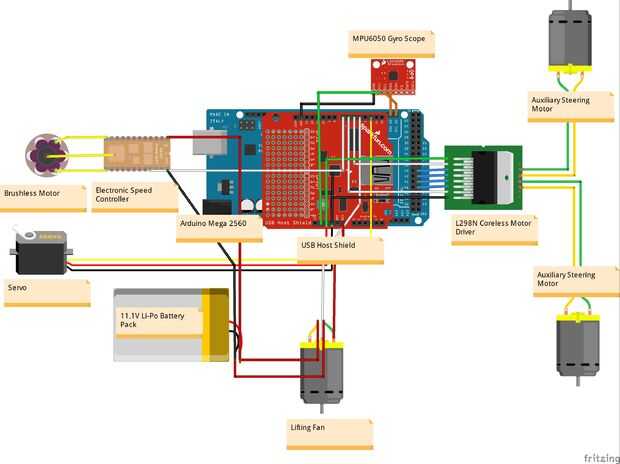
Se muestra arriba es un esquema breve. Todos los alambres verdes significan la fuente de alimentación 5V, todos los cables negros significan la tierra, todos los cables rojos significa la voltage(11.1V) materia prima suministrada por la batería, cables blancos PWM controlando los alambres y los cables naranjos dos es puerto de comunicación SPI, que es el puente entre el giro y la placa Arduino.
El motor sin cepillo, funciona como el principal propulsor, es conducido a través de un controlador electrónico de velocidad, que toma la señal PWM de la placa Arduino y ajustar la velocidad de rotación del motor según la señal.
El ventilador es controlado también por la señal PWM. Es decir, podemos ajustar la fuerza de elevación según la fricción del suelo. Si queremos el aerodeslizador funciona más constante, acabamos de reducir la fuerza de elevación y aumento de la fricción, o sólo aumentará la fuerza de elevación y dejarlo correr más rápido para competir por el campeonato.
Los dos motores auxiliares son conducidos por un controlador de motor barato, L298N controlador de motor. L298N tiene dos canales de conducción, es decir, pueden manejar dos motores simultáneamente. Gire la velocidad también está determinada por las señales PWM.
El alcance de giro habla con la placa Arduino a través del puerto SPI, que ya ha sido incrustado en el chip Arduino Mega. Tan sólo asegúrese de conectar el SCL y pins SDA del giroscopio al mismo pines en la placa de Arduino respectivamente, entonces usted puede dejar hablar. ¿Que es bastante conveniente, correcto? Después se enciende, el giróscopo detecta la velocidad angular del aerodeslizador y enviar a Arduino, qué tienes que hacer simplemente es activar motores auxiliares a habitar la velocidad angular de 0.
Preste atención a que el crudo voltaje suministrado por la batería alrededor de 11.1V, que es demasiado alta para la placa Arduino y otros componentes excepto los motores. Así que asegúrese de que cargar la batería con VIN pin de la placa Arduino en lugar de la VCC o 5V. El regulador de tensión integrado en el tablero puede ajustar el 11.1V energía 5V potencia automáticamente.













