Paso 5: Paso a paso 3: conexión de soldadura y
(1) soldar cada cable del motor sin escobillas para un conector banana macho (pueden necesitar un soldador de alta potencia, se recomienda 50W).
(2) Repita el paso (1) para los tres propulsores.
(3) soldar cada cable a los conectores banana hembra.
(4) Repita el paso (3) para todos los tres cables.
(5) cambiar a planchado de 25W con punta muy afilada, pequeñas almohadillas en el tablero del PWB para los cables de la soldadura.
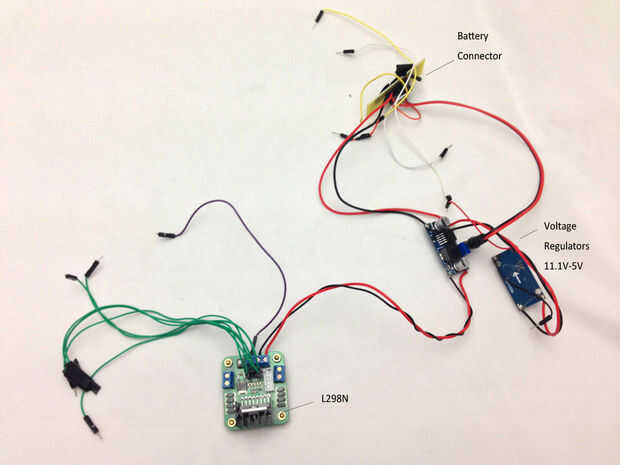
(6) cortar un tablero de rectángulo de 4 cm * 2 cm desde una placa wire-wrap, el par de cables de la batería para la soldadura y la soldadura más 4 pares de cables para ampliar esos dos cables, para que todos los componentes pueden ser alimentados uniformemente. Después de soldar, terminamos haciendo un conector de batería.
(7) de la soldadura de los cables desde el conector para el ventilador, el controlador electrónico de velocidad, los reguladores de tensión y la placa Arduino.
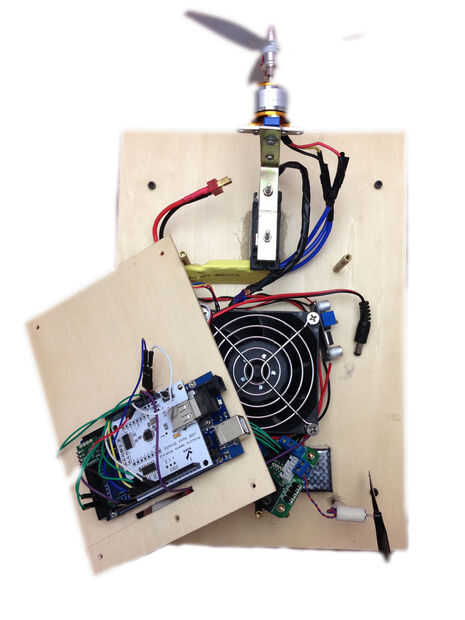
(8) desde la placa Arduino en sensible a la electricidad inducida en la punta del soldador, sería mejor soldar algo en la placa Arduino. Utilizamos conectores experimentales (un zócalo en un lado) y un pin en el otro lado para conectar componentes externos a la placa Arduino.
(9) Verifique cada conexión! Cualquier pequeño error puede arruinar todo tu trabajo!













