Paso 3: Programación del PIC
http://www.Rev-Ed.co.uk
El código se modifica fácilmente sin embargo no puso cualquier encabezado de programa "en circuito" en la PCB por lo que tendrás que sacar el PIC a programar.
El esquema y PCB podría ser utilizado para otra conexión / sensor de propósitos con las modificaciones de código necesario.
Aquí está el código básico:-
; Regulador de aguas grises MK2
símbolo de la bomba = 0; salida de nombre 0 como la bomba
símbolo ERROR_LED = 1; nombre de la salida 1 del error (error) LED
; waterfloat alta interruptor = entrada 3, bajo nivel de agua interruptor de flotador = entrada 4
que dirs = % 0000111
que pins = % 0000000; asegurar todas las salidas bajas
; interruptores de flotador son lógica inversa, un 0 significa se enciende
main_loop:
Si input3 = 0 y input4 = 0 then debounce; agua flotador marca
Si input4 = 0 then inc_timer; flotador marca de agua baja
Goto main_loop
inc_timer:
que w0 = w0 + 1
Si w0 = 36000 entonces start_pump; si agua en el tanque para 10 horas, arranque la bomba
PAUSE 1000; pausa de 1 segundo
Goto main_loop
Debounce:
PAUSE 500
Si input3 = 1 then main_loop, compruebe si el flotador está todavía alto
start_pump:
alta bomba; a su vez el relé de la bomba
pump_loop:
Si input4 = 1 then stop_pump; cheque para ver si bajo agua
Si w1 = 3600 entonces pump_error; error si bombas funciona continuamente durante más de 60 minutos
que w1 = w1 + 1
PAUSE 1000
Goto pump_loop
stop_pump:
BOMBA baja; parada de bomba
que w0 = 0; contador de agua añeja
que w1 = 0; contador de error
Goto main_loop
pump_error:
BOMBA de baja, parar la bomba
error_loop:
Si input4 = 1 then exit_loop; quedarse errores hasta el tanque de vacío
ERROR_LED alta
PAUSE 500
ERROR_LED baja
PAUSE 500
Goto error_loop
exit_loop:
que w0 = 0; restablecer contadores
que w1 = 0
baja ERROR_LED; reset error LED
Goto main_loop
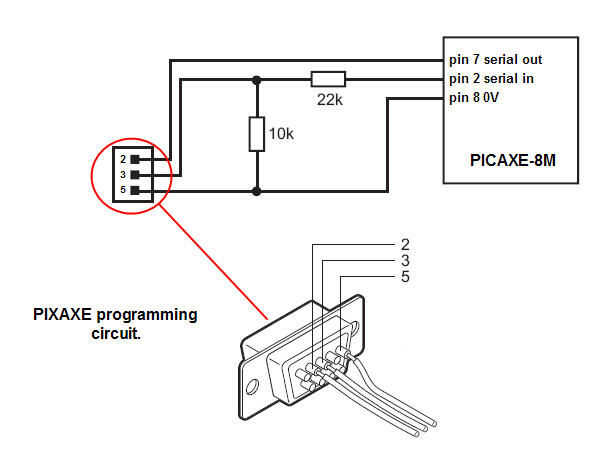
Configurar el siguiente circuito en una placa de prototipos para programar el PIC.
")








 con un 3D impreso WC fregadero!")



