Paso 2: Microscopio manipulador lateral




Bajo el microscopio serán tres sistemas CNC.
La sonda se inserta por el brazo manipulador en una ranura que se mueve en dos ejes y se puede mover para alinear la punta de prueba con el lente o mueva la sonda a la posición deseada. Entonces un motor paso a paso le ayudará con el enfoque del microscopio.
Después de que la sonda está en el lugar correcto y es enfocado, entonces dos sistemas como una impresora 3D Delta con una aguja en vez de la extrusora se mover, cortar o manipular la sonda.
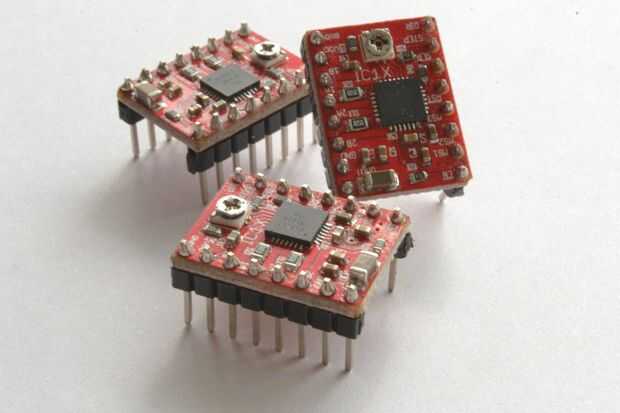
El ChipKit Pro MX7 conducirá los motores paso a paso utilizando los controladores A4988 y leerá los datos de finales de carrera y otros sensores. También controlará el brazo robótico que se encarga de las sondas.
Hasta ahora, el diseño tiene seis motores paso a paso para el sistema de agujas (de los controladores de cd/dvd), dos para el sondeo de posicionamiento sistema (mismo motor) y se utiliza para el enfoque.
La fuente para esta parte del proyecto será una fuente de alimentación ATX.
La estructura del brazo robótico se discutirá en el siguiente paso.
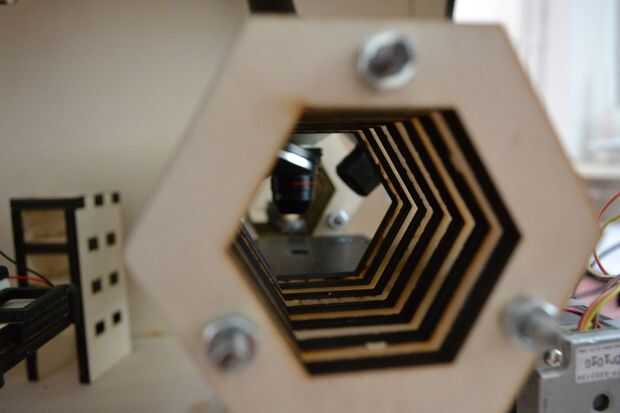
El microscopio utilizado en este proyecto es un Bresser Biolux NV con una cámara digital (localmente fue comprado)
http://www.Amazon.co.uk/Bresser-5116200-Biolux-20x...
Actualizaciones:
03.05.2015 - una pluma era 3D impreso y el código para la parte de entrada está en su manera :)






")



")


