Paso 3: código
http://www.cunningturtle.com/attiny4585-servo-Library/
De lo contrario usted tendrá que crear su propia biblioteca de servo (si usted por favor lo publique en la Página Web de arduino!) o tienes que escribir la señal que requiere el servo. Un servo necesita básicamente PPM (modulación de posición de pulso).
¿Cómo funciona? La longitud del pulso "Alta" dirá el servo que posición tiene que mover a. El pulso de "Baja" se requiere entre 2 "alta" impulsos y tiene que ser 5-25 ms largo
Tienes que jugar con la longitud de los pulsos porque depende de servo, el ángulo que desea abrir la puerta (alimento caído), etc.
El alimento cae diferentemente en cada canal (acuarios tienen tamaños diferentes). Servos del primer canal hacen un poco y rápido movimiento (uno es para el pequeño acuario). Servos del segundo canal hacen un poco de movimiento más amplio que el anterior y lo hace 2 veces. Esto es para evitar una comida excesiva repentina caída.
Los comentarios son bienvenidos!
Si tienes un arduino y quieres programar tu attiny usarlo puedes echar un vistazo a este tutorial:
Algunas mejoras que se hará próximamente:
-Usando el modo de reposo para bajar el consumo de energía y funcionar con una batería de
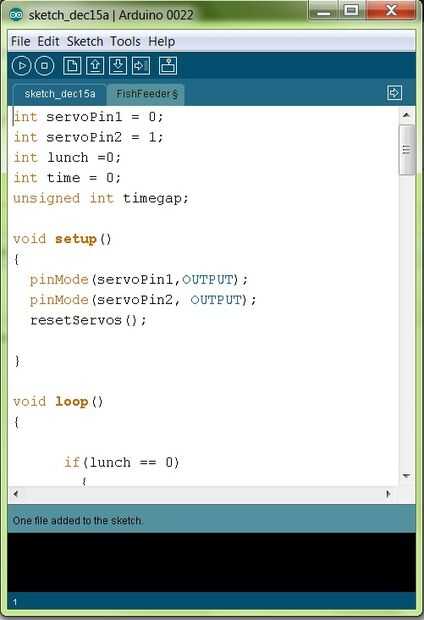
Aquí está el código:






")






")