Paso 4: Diseño de PCB
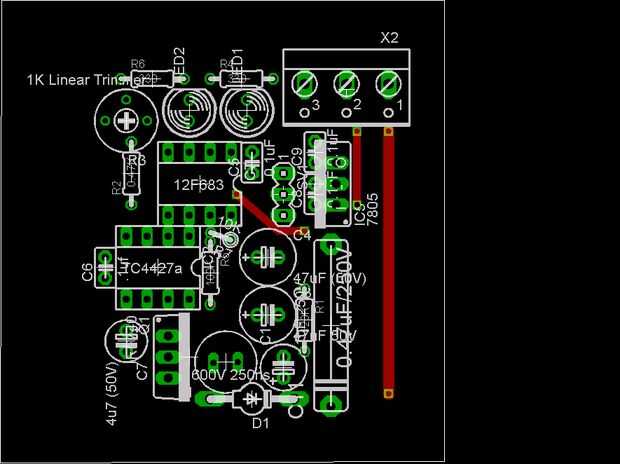

Vieron varios diseños existentes al hacer este PCB. Aquí están mis notas re: características de diseño importantes:
1.I había seguido la nota de aplicación de Microchip y utiliza un TC4427A para conducir el FET. Este A) protege el microcontrolador de flyback tensiones provenientes de la FET y B) puede conducir al FET en voltajes más altos que el PIC para más rápido/más difícil cambiar con mayor eficiencia.
2 la distancia entre el PWM del PIC y el FET se reduce al mínimo.
3. FET, inductor, condensadores lleno realmente apretado.
4. grasa fuente rastro.
5. buena tierra entre FET y hierba de pared punto de conexión.
Elegí el microcontrolador PIC 12F683 para este proyecto. Este es un PIC de 8 pines con hardware PWM, 4 análogo a convertidores digitales, oscilador interno 8Mhz y 256 bytes EEPROM. Lo más importante, tenía uno en de un proyecto anterior. Usé el FET IRF740 debido a su alto reconocimiento en la lista de Neonixie-L. Hay 2 condensadores para suavizar la fuente de alto voltaje. Uno es una electrolítica (alta temperatura, 250 voltios, 1uF), la otra es una película metálica (250 voltios, 0.47uf). Este último es mucho más grande y más costoso ($0,50 vs $0,05), pero es necesario para conseguir una salida limpia.
Hay dos circuitos de realimentación de tensión en este diseño. El primero permite que el PIC detecta el voltaje de salida y aplicar pulsos a FET como sea necesario para mantener el nivel deseado. "Tabla3. Alta tensión retroalimentación red cálculos"pueden utilizarse para determinar el valor de retroalimentación correcta dado el divisor de voltaje 3 resistor y desea tensión de salida. Ajuste fino se hace con la resistencia trimmer de 1 k.
La segunda respuesta mide la tensión de alimentación para que el PIC pueda determinar lugar óptimos valores de tiempo (y período/duty ciclo). De las ecuaciones en el paso 1 se encontró que el tiempo de subida de inductor es dependiente de la tensión de alimentación. Es posible introducir valores exactos de la hoja de cálculo en su PIC, pero si se cambia la fuente de alimentación los valores ya no son óptimos. Si ejecutando desde las baterías, la tensión disminuirá como la descarga de baterías que requiere un tiempo de subida. Mi solución fue para que el PIC calcular todo esto y establecer sus propios valores (véase firmware).
El puente de tres clavijas selecciona la fuente de abastecimiento para la bobina de TC4427A y del inductor. Es posible ejecutar ambos de 5 7805 regulador de voltios, pero la mejor eficiencia y una mayor producción se logra con un voltaje mayor. El TC4427a y el FET IRF740 resisten hasta 20 voltios. Puesto que el PIC se calibrará para cualquier tensión de alimentación dada tiene sentido para alimentar directamente de la fuente de alimentación. Esto es especialmente importante en la operación de la batería - no necesita desperdiciar energía en el 7805, sólo alimenta el inductor directamente de las células.
El LED son opcionales, pero muy útil para la resolución de problemas. El LED 'izquierdo' (amarillo en mi juntas) indica que comentarios de alto voltaje en el punto deseado, mientras que el derecho (rojo en mi diseño) indica que es. En la práctica que se consigue un agradable efecto PWM en las que los LEDS brillan en intensidad en relación con la corriente de carga. Si el rojo que LED se apaga (sólido) se indica que, a pesar de su mejor esfuerzo, el PIC no puede mantener la tensión de salida al nivel deseado. En otras palabras, la carga excede la salida máxima de SMPS.
OLVIDAR LOS CABLES PUENTE EN ROJO!
Oferta
Valor de la parte
C1 1uF 250V
C3 47uF 50V
C4 47uF (50V)
C5 0.1uF
C6 .1uf
C7 4u7 (50V)
C8 0.1uF
C9 0.1uF
C11 0.47uF / 250V
D1 600V 250ns
IC2 TC4427a
IC5 7805 regulador de 5 voltios
IC7 PIC 12F683
L1 Inductor (22R104C)
LED1
LED2
Q1 IRF740
R1 120K
R2 K 0,47
Accesorio cortador lineal de R3 de 1 K
R4 330 Ohm
R5 100K
R6 330 Ohm
R7 10K
Jefe del Pin 3 SV1
X2 3 Terminal de tornillo













