Paso 3: cables
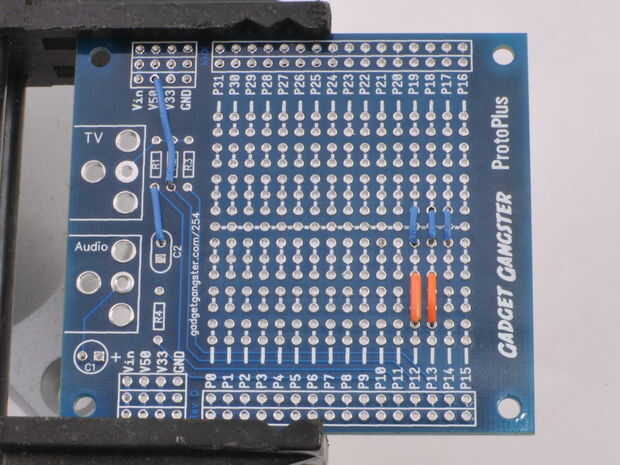
- Tres cables en el centro conectarán a ambos conjuntos de cabeceras de servo
- Dos cables de conexión de P12 y P13 sacar energía del receptor R/C para encender el propulsor plataforma USB
- Un puente desde la base de R1 en la parte superior de C2 conecta a tierra
- Un puente desde la base de R2 a V50 conecta energía
Aquí es el circuito para leer Estados de servo;
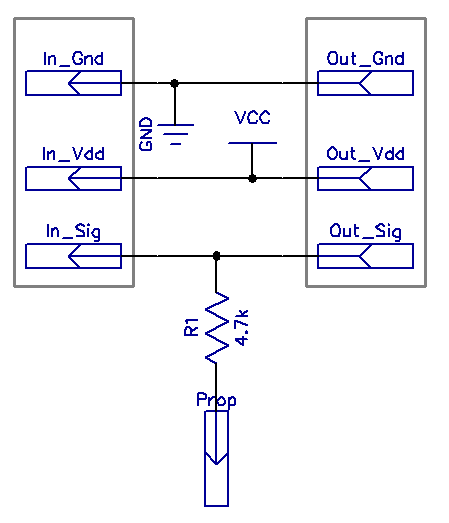
Dibujamos un poco poder (a través de Vcc) para ejecutar el animador de R/C y el resto va en al servo. Nos espía sobre el estado del servo a través de un 4.7 k ohm resistor conectado al cable de señal del servo.



 para hacer su coche sterio de sonido impresionante!")

")







