Paso 3: Hacer el circuito
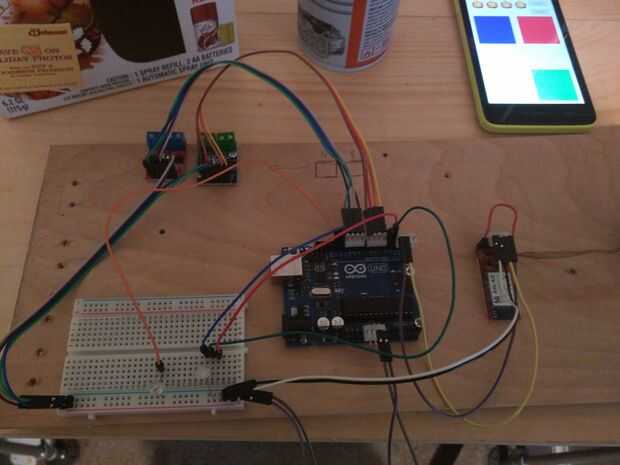
Este es un circuito bastante fácil ya que todo es más o menos plug-and-play. El Arduino acepte comando entrante a través del módulo de bluetooth y activar/desactivar los motores respectivamente.
El módulo bluetooth se conectarán a los pines 0 y 1 en el Arduino.
(Bluetooth) RX -> Tx (Arduino)
(Bluetooth) TX -> Rx (Arduino)
(Bluetooth) VCC -> 5v/Vin (Arduino)
(Bluetooth) GND -> Gnd (Arduino)
(Bluetooth) RTS -> Cts (Bluetooth)
El puente H de A-IA, A-IB, IA B y B-IB deben conectarse a los pines de I/O digitales de Arduino.
Los puentes de H se pueden controlar con PWM usando AnalogWrite (PIN, 0-255) para controlar la velocidad del motor, pero para este proyecto que no tiene que preocuparse acerca de PWM y pueden conectarse a cualquier pines de I/O en el Arduino. Tome nota de que los pernos que conectado en el puente H para el Arduino, como tendremos que hacer referencia a estos pines en el código en el paso siguiente. Usé carriles de la energía de un protoboard para distribuir el poder entre el módulo de Bluetooth y los puentes de H y también fue capaz de conectar LEDs así.
Para conocer más sobre el funcionamiento de los puentes de H te sugiero estos enlaces:
https://en.wikipedia.org/wiki/H_bridge http://www.bajdi.com/l9110-h-Bridge-Module/ http://www.modularcircuits.com/blog/articles/h-Bridge-Secrets/h-Bridges-The-Basics/










 con Arduino y Android(bluetooth)")


