Paso 1: Construir el coche - Hardware
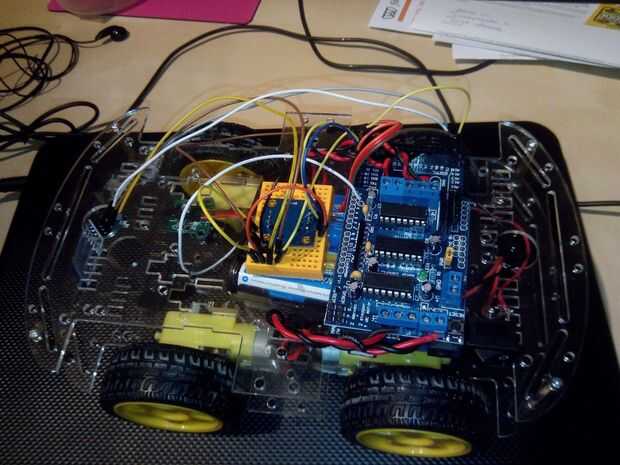
Para construir, o mejor dicho montar, el coche tendrá los siguientes componentes:
- Chasis del coche (usted puede encontrar los que aparecen aquí, en Ebay o AliExpress, buscando "coche robot inteligente")
- Dos (o cuatro) motores de corriente continua
- Las ruedas (por facilidad, comprar un kit que contiene todo lo anterior)
- Arduino Mega
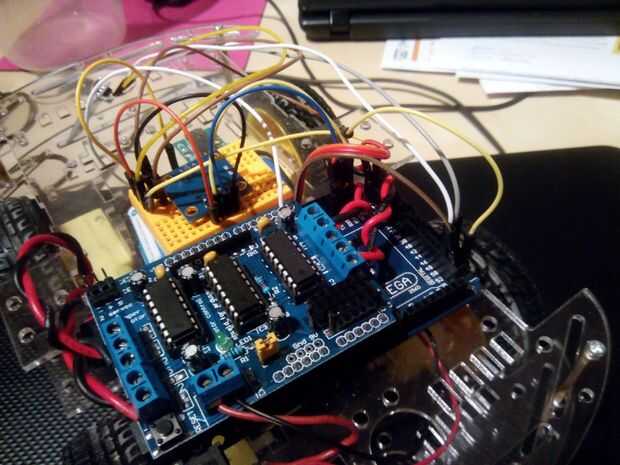
- Protector de motor L293D (solía hacerse por Adafruit, pero ahora lo encuentras vendidos por distribuidores chinos)
- Giroscopio de L3G4200D (utilizado para girar el coche a grados específicos)
- Codificadores de velocidad (este o este se juego el kit para coche que sugerí arriba)
- Sensor de ultrasonidos HC-SR04 (utilizado para la detección de obstáculos en la parte delantera del vehículo)
- Módulo Bluetooth HC-06 (utilizado para comunicarse con el teléfono Android)
- Batería (nosotros utilizamos una de 12 voltios, con 8 pilas AA)
Por supuesto no tienes que usar estos componentes específicos. Solo estoy mencionando los encontró en "Alice" y con el cual, el software se hace referencia aquí debería funcionar sobre todo fuera de la caja. El costo de "Alice" es de aproximadamente 40$ si todo es comprado de China.
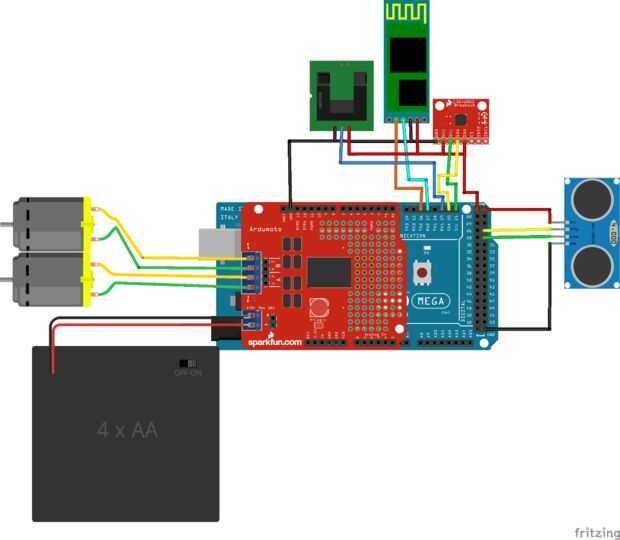
Consulte el esquema para entender cómo se hacen las conexiones.
En Resumen, los motores Haz Unidos al escudo del motor como el paquete de baterías. El giróscopo se conecta al I2C bus y no se olvide de conectar la clavija SD0 en 5V. Conecte el encoder de la rueda al perno de 19 (o cualquier otro pin que soporta la interrupción externa) y el módulo de Bluetooth a un puerto serie (RX TX y TX a RX). Por último, conecte el sensor de ultrasonidos para cualquier dos pines de entrada.











")
