Paso 6: Conectar un 3.3v a 5v nivel desplazador para el Arduino


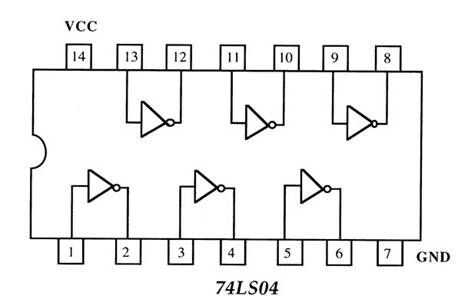
Hay varias formas de abordar esto pero vamos a usar un chip 74LS04 en este ejemplo. Puedes Buscar uno aquí y es probables debajo de $1. Tim y yo recogido nuestro del Hacker Dojo en Mountain View, CA, pero estos son muy comunes y debe ser abundante dondequiera que chips son vendidos o donados.
Un alto nivel simplemente vamos a enviar la señal de TX de la USB HTS breakout Junta en pin 1 del chip 74LS04. Para hacer trabajo que pasar por el chip dos veces y sale pin 4 al pin RX en el Freeduino SB (su pin serial puede ser diferente si tienes otra placa Arduino pero todos deben apoyar esto).
Siga estos pasos para conectar el cambiador de nivel y el tablero de HTC USB (no conecte el teléfono todavía y desconecte la potencia para el Arduino):
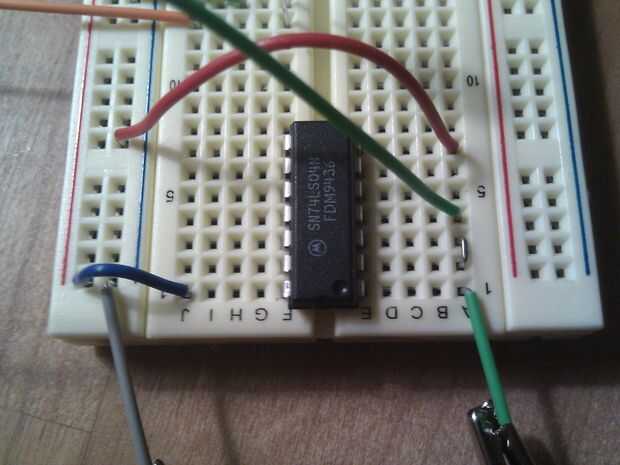
1. Inserte el chip 74LS04 en su protoboard. Asegúrese de que los obstáculos de la viruta el centro romper así los pasadores no están en cortocircuito (una jugada tonta que hice al principio)
2. soldado dos cables a la placa USB HTC como se describe en este instructable, pero sólo usaremos pernos 7 (tierra) y 8 (TX0) puesto que sólo estamos haciendo la transmisión unidireccional de este tutorial.
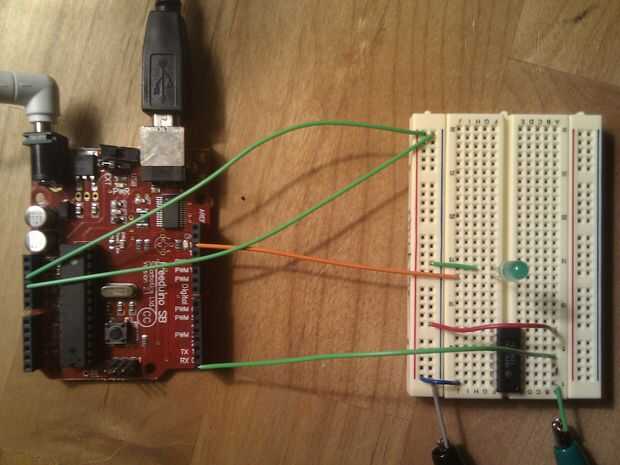
3. Conecte el otro extremo del cable de conexión (pin 7) a una tierra en su protoboard (que debe conectarse a tierra en su Arduino)
4. Conecte el otro extremo de la TX0 (pin 8) cable a la placa donde funciona en pin 1 del chip 74LS04. (hacer una búsqueda de imágenes para un diagrama completo del chip)
5. use un cable para conectar el pin 2 y 3 de la viruta
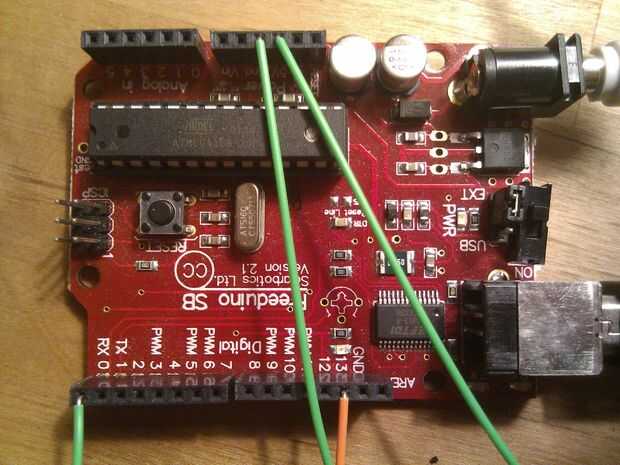
6. conectar el pin 4 del chip hasta el punto de Arduino RX (pin 0 de la SB de Freeduino y Arduino Duemilanove)
7. conectar el pin 7 (GND) en la viruta en el suelo para su protoboard (que también se conecta a la tierra del Arduino)
8. conectar el pin 14 (VCC) a la energía 5v en su protoboard (que recibe la energía de la salida de 5v de Arduino)
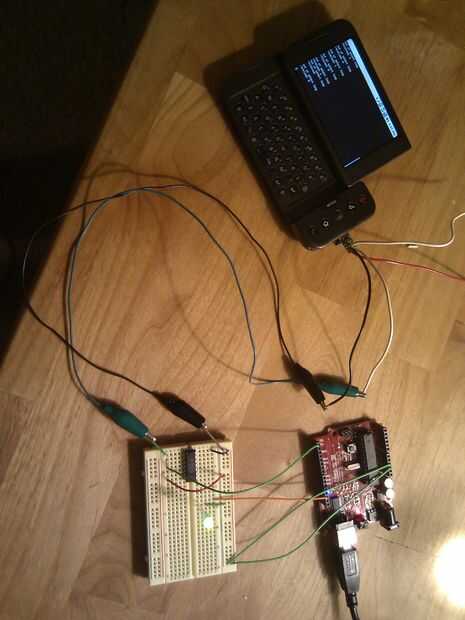
Ahora debe ser listo para enchufar en la Junta de rotura HTC USB en la parte inferior del teléfono y alimentación en el Arduino. Busque las chispas y huele y toca las cosas para asegurarse de que son frescos.
Nota: el código actual cellbot enciende LED #13 cuando los servos del robot deben estar en ejecución. Si no tienes un robot, sin embargo, usted puede comprobar para ver que se enciende el LED y apagado para confirmar que está trabajando.


")
 Básicos Arduino Robot buscador de luz!")








