Paso 8: Ejecutar el proceso
"q" dejar el script en Python en el teléfono y cerrar la toma terminal.
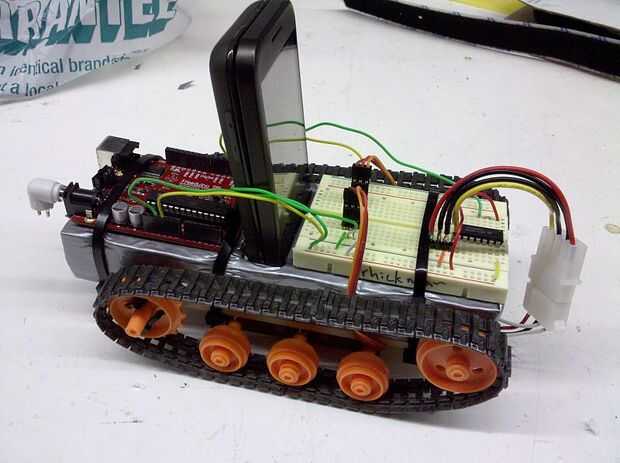
Aquí está un resumen de cómo funciona todo:
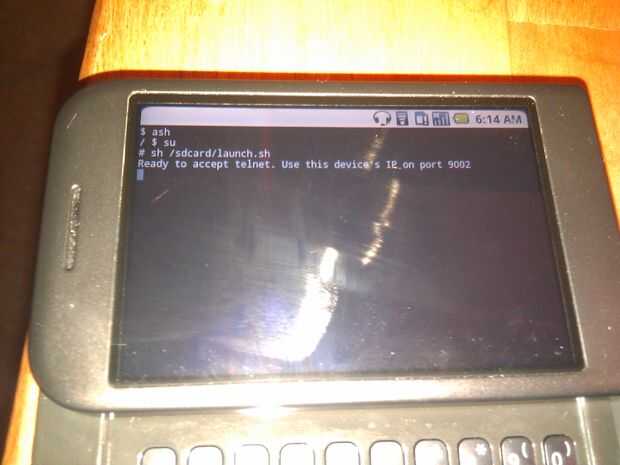
1. la secuencia de comandos de Python abre un socket para aceptar conexiones entrantes de telnet y los comandos por el puerto serie del eco
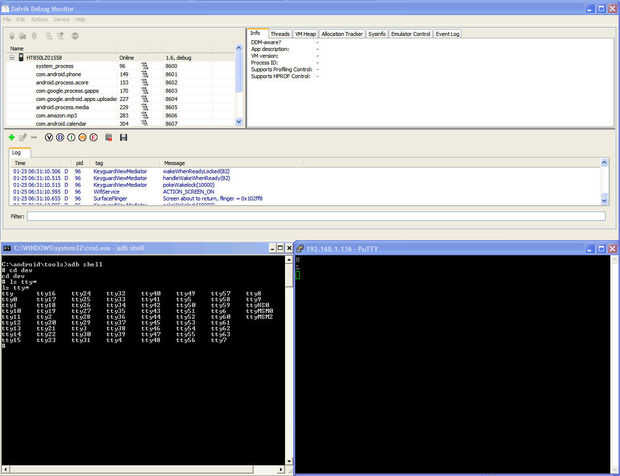
2. conectar desde nuestro PC a teléfono a través de telnet en el puerto 9002 y enviar que los comandos que vemos en pantalla
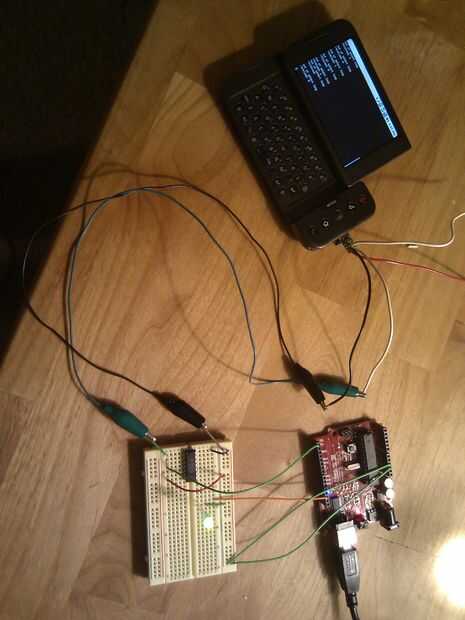
3. las interfaces de tablero USB HTS con puerto USB del G1 y señal envía los 3.3v en el pin 1 del 74LS04.
4. la señal sale el chip en el pin 2 va detrás el pin 3 y sale otra vez el pin 4 a 5v
5. nuestro Arduino acepta la señal serial en el pin RX 0 y proceso por medio del programa Cellbot.pde
6. podemos teclear 'q' para matar el script en Python y para cerrar la conexión de telnet
Ahora que has completado este proceso muy complicado para enviar comandos básicos a un robot Arduino, es hora de que hackear para ser más impresionante! Aún no tenemos 2 vías serie trabajando el Arduino no puede enviar órdenes en el teléfono, pero estamos trabajando en eso.
Manténgase actualizado mediante la suscripción a nuestro blog en Cellbots.com.
Sobre el autor:
Tim Heath
Investigador que primero armaron este proceso en la tienda de tecnología en Menlo Park, donde él es un miembro principal.
Ryan Hickman
Programador que trabajó en el código Python y Arduino y authoered este Instructable.


")
 Básicos Arduino Robot buscador de luz!")








