Paso 5: Conectar al arduino

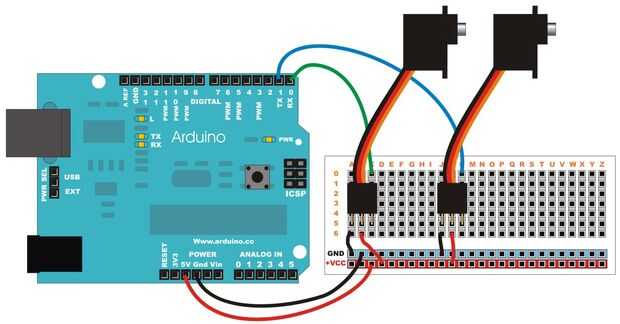
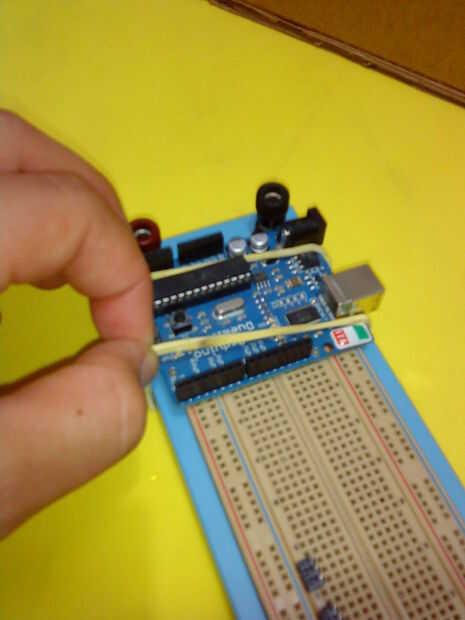
En este ejemplo, utilicé los puertos 0 y 1.
Software:
int pos = 0; VARIÁVEL da posiçao servo
anival int = 0; VARIÁVEL vai Selecione animal de o
int randomval2 = 0; VARIÁVEL tempo de pausa
#include < Servo.h > / / biblioteca servo
Servo macacoc; creando o objeto macaco corpo
Servo macacop; creando o objeto macaco pescoço
void setup)
{
macacoc.Attach (0); atribuindo o corpo macaco ao pino 0
macacop.Attach (1); atribuindo o pescoço macaco ao pino 1
}
void loop)
{
Inicio:
randomval2 = random (4); VARIÁVEL para Selecione o tempo de pausa
randomval2 = randomval2 * 1000; ajustando o tempo para segundos: 0, 1, 2 o 3 segundos
macacop.Write(90);
para (pos = 130; pos < 170; pos += 1)
{
macacoc.Write(POS);
Delay(30);
}
Delay(2000);
para (pos = 170; pos > = 130; pos-= 1)
{
macacoc.Write(POS);
Delay(40);
}
para (pos = 90; pos < 140; pos += 1)
{
macacop.Write(POS);
retardo (15);
}
para (pos = pos > 90, 140; pos = 1)
{
macacop.Write(POS);
retardo (15);
}
para (pos = 90; pos < 140; pos += 1)
{
macacop.Write(POS);
Delay (10);
}
para (pos = pos > 90, 140; pos = 1)
{
macacop.Write(POS);
Delay (10);
}
retardo (randomval2);


")



")






