Paso 2: Caracterización de las salidas del sensor de la Cateye Ergociser
Una simple conexión de un voltímetro en los cables de señal que el sensor de cadencia y giro de la biela mostraron un 0V a 5V la transición de señal cuando el sensor cruzado el imán. Rango de 5V es aceptable para su uso con las entradas digitales del Arduino.
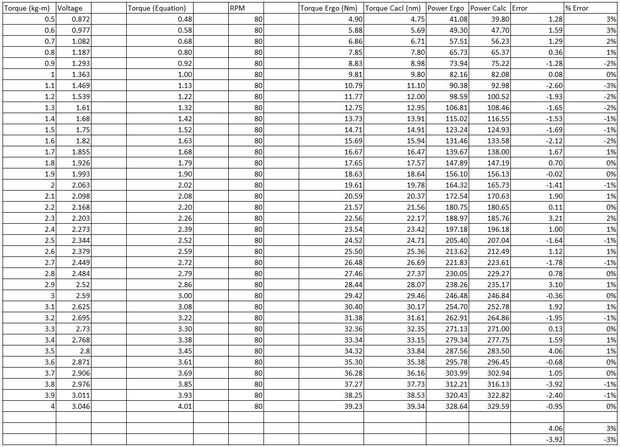
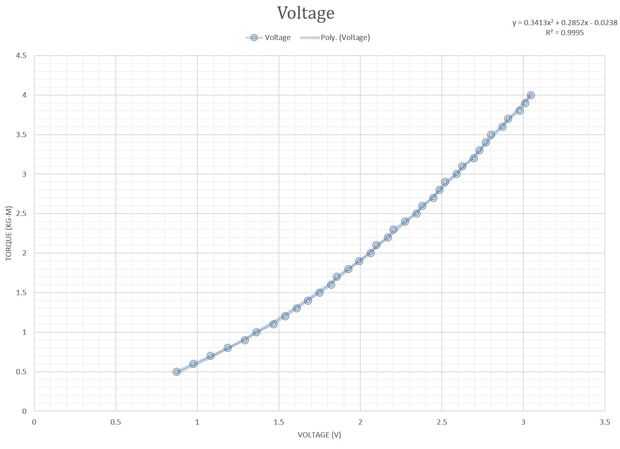
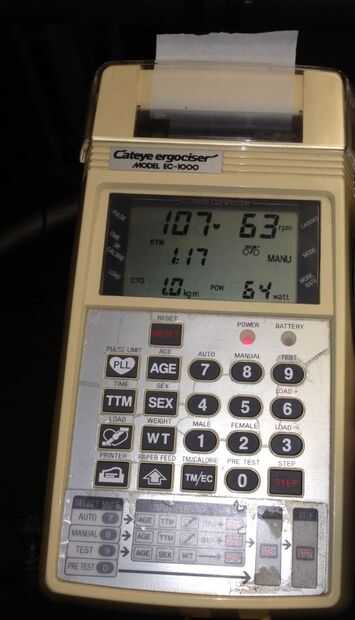
La conexión de medidor de potencia necesaria medición y calibración. La unidad principal de la moto envía una señal de control (tensión) a la bobina que proporciona un nivel de apriete de la resistencia. En la imagen superior, es el valor CTQ. Las unidades están en kg-m. Cambió el valor CTQ de 0.5 a 4.0 en la unidad principal (usando el botón carga +) y había conectado un voltímetro en los cables empalmados de la señal de control de la bobina y mide el voltaje. Después ingresaron este datos en una hoja de cálculo de excel y una relación entre el esfuerzo de torsión (kg-m) y el voltaje de ajuste de curva. Usé un segundo orden polinómico curva de ajuste. Luego hice cálculos en el nivel de error que obtendría en las lecturas de energía entre la energía de la unidad principal aparece y la potencia de Arduino calculado (usaremos esta ecuación de mejor ajuste un poco más adelante en el código de Arduino). Estaban en un nivel razonable por lo que determinaron que este ajuste de la curva de los datos era suficiente para utilizar en el futuro.
Las ecuaciones utilizadas son a continuación:
Esfuerzo de torsión (n-m) = Torque (kg-m) x 9.80665
Potencia (w) = (esfuerzo de torsión (kg-m) x RPM) / 9.5488
Ajuste de curva ecuación: Torque calc (kg-m) = 0.3413 * voltaje ^ 2 + 0.2852 * voltaje 0.0238


")
")





 o C# (Windows)")
")


