Paso 3: Cableado de la Arduino a la bicicleta estacionaria y el transmisor-receptor de ANT +
Las conexiones necesarias para el Arduino (yo usé la edición especial de Arduino Uno, adquiridos en Radio Shack) al proceso de la información y envían datos en serie al transceptor ANT + son las siguientes:
1. esfuerzo de torsión lectura (voltaje) = A0 analógico en Arduino
2. RPM lectura (Digital) = D3 Digital en Arduino
3. RX en de ANT + receptor = Digital D8 en Arduino
4. TX a ANT + receptor = D9 Digital en Arduino
5. Vin de tablero de Control de Cateye = Vin en Arduino (región de alimentación de entrada)
6. tierra de tablero de Control de Cateye = GND de Arduino (región de alimentación de entrada)
Usé la subrutina serial software (myserial) utilizar estos lugares pin digital de Arduino (TX/RX son los pines 0 y 1 por defecto). Esto lo hice todavía podía leer la conexión serial a través de USB desde el Arduino al PC para la depuración en la pantalla de los datos procedentes de la Arduino.
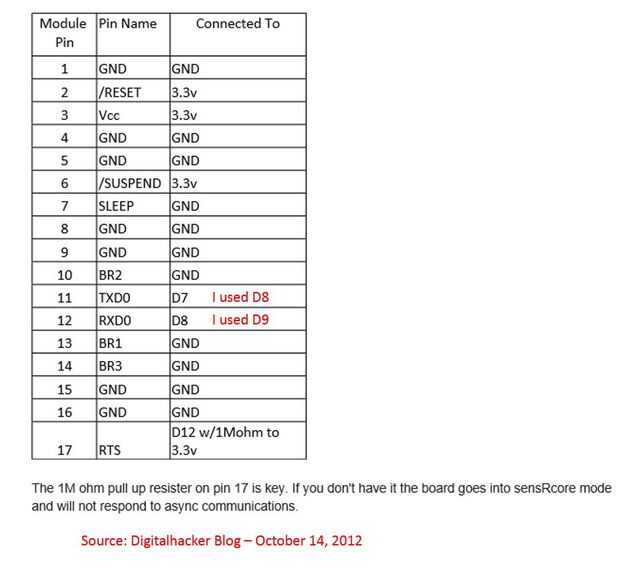
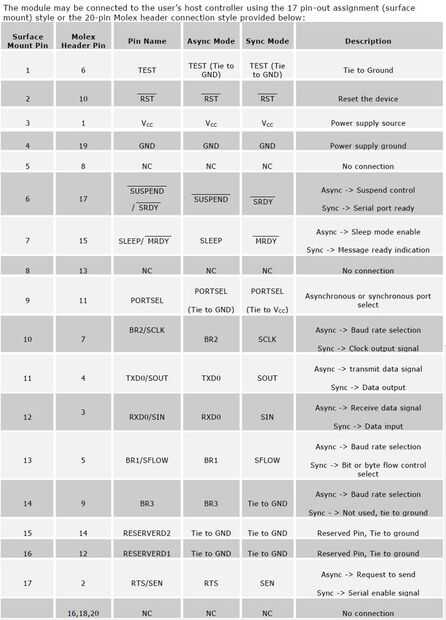
También usé un tablero de puente intermedio para hacer conexiones entre el TX del Arduino y RX del transceptor ANT +. Tuve que usar un divisor de tensión a paso de 5V (la salida de Arduino) a los 3, 3V (límite de la entrada de voltaje máximo de la señal de RX para el transmisor-receptor ANT +). El ANT + transmisor-receptor que utilicé fue la Dynastream ANTAP281M4IB en Digikey. Fue difícil para la soldadura y también las conexiones de puente correcto. Si algo nuevo hay en el mercado, me gustaría ir esta ruta la próxima vez. Recursos para el cableado correctamente el Dynastream fueron encontrados en la web en la siguiente URL: Blog de Digitalhack, sobre todo el comentario con respecto a la conexión del Pin 17 RTS. Las diferencias en mi cableado eran que TXD0 en el dynastream se conectó a D8 (RX) en el Arduino y que RXD0 en el dynastream se conectó a D9 (TX) en el Arduino. Otra hoja de datos en el Dynastream ANTAP281 están disponibles en la siguiente URL: hoja de datos de ANT +. La descripción de la conexión para todas las ubicaciones pinout 17 son descritos anteriormente (la versión que utilicé fue la versión de montaje superficial de este transceptor ANT +). Tenga en cuenta que en el método que cubrió a la Dynastream, la tasa de baudios para comunicar que es 4800 baudios. Necesitamos el código de Arduino para reflejar esto.


")
")





 o C# (Windows)")
")


