
"Estos materiales y la información contenida en este instructivo son proporcionan por los estudiantes matriculados en el Software de lugares (www.softwareofplaces.com) clase en la Universidad PUC-Rio. El contenido representado aquí es el proyecto final del estudiante de marsopa de la evaluación de clase publicado por el estudiante y es responsabilidad exclusiva del autor de la página. Declaraciones y opiniones expresadas son estrictamente los del autor y no de la Universidad PUC-Rio."
¡Hola!
Es nuestro instructivo para proporcionar una base hardware y API para un Robot ayudante de Office. La idea principal es proporcionar que un web control API que controlan un robot de control remoto. Usamos algunas piezas de hardware y software confiando en Galileo Intel o Intel Edison.
No pretendemos proporcionar todavía otra web controló el coche poco, pero hacer así! Sin embargo it´s solo una prueba de concepto. Alrededor de él trata de explicar cómo usarlo y cómo extender. Crear tu robot como un coche, puede insertar sus propio módulos como armas, camaras, sensores, pantallas etc.
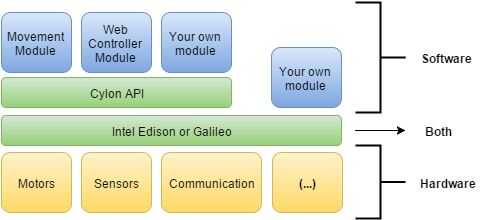
En la siguiente imagen ilustra el enfoque para proporcionar nuestro Robot. Tenemos intención de utilizar Intel Edison/Galileo para controlar todo el hardware mediante el uso de it´s API de NodeJS que varios bloques de código manejo. Es capaz de ejecutar nuestro código breve para controlar el movimiento y usted puede insertar sus propias características.










![Añadir Bluetooth 4.0 para su proyecto de Arduino [Internet] - controlada por Smartphone](https://foto.askix.com/thumb/170x110/f/c7/fc78354fbccfdfa24c7ce38d848de24c.jpg "Añadir Bluetooth 4.0 para su proyecto de Arduino [Internet] - controlada por Smartphone")


