Paso 3: Software
Descargado de http://www.polargraph.co.uk/
Aquí hay algunos trucos que aprendí después de un tiempo.
1 - antes de cargar software a arduino (polargraph_server_a1.ino) cambiar constante en
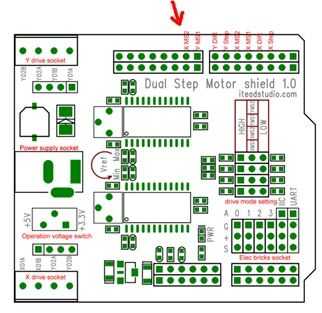
"byte const PEN_HEIGHT_SERVO_PIN = 10;" en ficha de polargraph_server_a1. ¿Por qué? Porque por defecto pin a 9 pin de escudo de paso a paso de los partidos "Y ajuste de MS2" figura a continuación relacionados con la velocidad que en nuestro caso se establece por puentes. Obviamente pin de señal del servo ahora necesita estar conectado al pin10.
2 - para este escudo del motor específicas paso a paso por favor cambiar esto en la ficha Configuración:
#ifdef SERIAL_STEPPER_DRIVERS
#define MOTOR_A_ENABLE_PIN16 / / mi Nota: pin A2 en escudo de doble paso a paso «ENX»
#define MOTOR_A_STEP_PIN 2
#define MOTOR_A_DIR_PIN 3
#define MOTOR_B_ENABLE_PIN 14 / / / mi nota Pin A0 en escudo de doble paso a paso "ENY"
#define MOTOR_B_STEP_PIN 6
#define MOTOR_B_DIR_PIN 7
3 - ajustes de PolargraphSD importantes que usted necesita para cambiar en la ficha Configuración o en el archivo default.properties.txt:
Anchura en mm de la máquina, utilice el valor que mide utilizando por debajo de las instrucciones.
Altura en mm de la máquina, utilice el valor que mide utilizando por debajo de las instrucciones.
mm por rev – establecer en 95 (¿por qué? Esta es la longitud de cadena tratada hacia fuera por una revolución del motor)
Pasos por rev – establecida en 200 si tienes un v2 de PolargraphSD comprados después de julio de 2014, de lo contrario debería ser 400 (¿por qué? Este es el número de pasos todo que el motor es capaz de hacer)
Paso multiplicador – establecer en 8 (¿por qué? Este es el valor predeterminado de microstepping para el polarshield – esto establece la resolución interna que utiliza la máquina mientras se mueve)
Al pulsar Guardar propiedades en la esquina superior izquierda, guarda los cambios en su propio archivo de propiedades internas, por lo que estarán allí al cerrar y reiniciar.
Nota: cambiar valores en el controlador de Polargraph necesita a la izquierda haga clic y mantenga en movimiento de arriba-abajo del movimiento del ratón.
También algunos parámetros pueden ser cambio en polargraphcontroller.exe pero Recuerde cambiar parámetro necesidad mantener click izquierdo y mueva el ratón hacia arriba y hacia abajo. No te olvides de "Especificaciones de la máquina de subir" {configuración} para actualizar todos los parámetros en el arduino.

")

")









.")