Paso 4: Conexión de alimentación y el conductor de paso
Ahora saca tu breadbord solderless! No necesitamos de la soldadura o conexiones de lujo en esta etapa, primero sólo queremos comprobar que todo funciona.
No entraré en mucho detalle con la electrónica y la aplicación, supongo que usted sabe su materia y también puede tener distintos componentes que tengo. Sólo le explicará qué va dónde.
Poder para arduino (Suponiendo que tienes 12 V, 2A de alimentación)
Se potencia su paso driver y arduino por separado así que una conexión en paralelo (4 cables) con su fuente. GND1 a gnd de arduino, VCC1 a VI en arduino (voltaje en no 5 V si no utilizas fuente de 5 voltios!).
Dependiendo de qué controlador de paso tiene, puede tener un pin llamado "sueño". Cuando se we´re no usar las persianas vamos bien establece el controlador para dormir o apagar a reducir consumo de energía. En este proyecto no utilizará la función del sueño pero en cambio el conductor encender y apagar justo antes de que use (en caso de que el controlador no tiene la hazaña de sueño). Despertar el controlador del sueño es más rápido que a partir de él, su generalmente alrededor de 1 ms, pero en nuestro caso que no es necesario.
Potencia motor
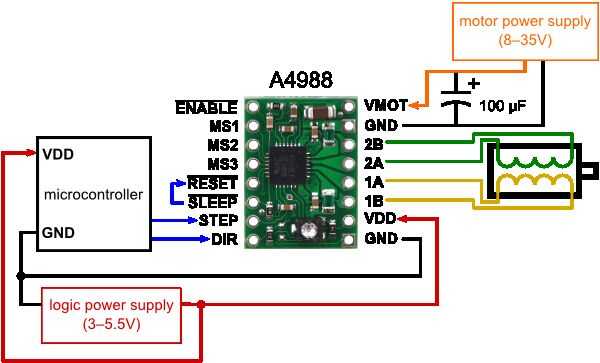
Ver la imagen adjunta. Vamos a comenzar con nuestra fuente de 12V. Conectarse VCC2 y GND2 VMOT y GND. (Debe) también puede conectar un condensador de 100uF entre ellos.
Esta bien, ahora el motor tiene potencia. Ahora suministramos el conductor con energía!
Alimentación al controlador
Conecte el otro GND (uno más bajo en la imagen) a su tierra. La VDD pin fuerza de voluntad por el conductor, es el que se encienda y apague. Conéctelo al pin 16 en su arduino.
Controlador de paso bien tienen poder. Curso de we´re ahora a dar algunas señales para trabajar con.
Controlador de señales
Conecte el DIR al pin 14 en arduino. Conecte el paso al pin 15 en arduino. Dependiendo de su controlador de paso podría tener patillas como MS1, MS2, MS3. Estas son para "microstepping", este proceso permite a su motor hacer pasos más pequeños. No estamos interesados en esto como 200/400 pasos por rotación está ya por encima de nuestras necesidades. Microstepping permite generalmente conectando el pin (MS1, MS2...) a VCC o GND. Revise su hoja de datos paso a paso. Tener cuidado que con paso más pequeño podría dar menos par de torsión (y podría desbordarse la variable int en el código contando super muchos pasos).
Señales de motor de paso
Bueno ahora vamos a hacer una conexión temporal entre el controlador y el motor de paso. Esto es para asegurarse de que todo funciona antes de proseguir.
Puesto que diferentes steppers utilizan diferentes colores de los cables voy a describir un método que funcione para todos los steppers. Lo quiero saber es que cable va donde. Los cuatro cables están en pares, dos por bobina (el motor tiene 2 bobinas). La forma más fácil es tomar un multímetro o un LED y conectar a dos pernos. Ahora gire el eje del motor, si el multímetro es un you´ve de voltaje encontraron un par! Si utiliza un LED se enciende, asegúrese de que cambiar los pernos si no funciona (como LEDS sólo permite corriente fluya en una dirección).
Ahora conéctelos en pares para el paso a paso. Par 1 va a 1B, 1A y par 2 2A, 2B. Más adelante cuando los probamos, si descubres que giran en la dirección incorrecta puede cambiar la posición de los pares.
Cálculo de la corriente y ajuste de la Vref
Dependiendo de paso el tipo de controlador, revisa este enlace o consultar su hoja de datos.
http://RepRap.org/wiki/Pololu_stepper_driver_board
Si usted planea utilizar un conductor y dos motores, asegúrese de que calcular la resistencia paralelo de los motores o podría quemar su controlador!
Breve explicación de cómo funciona
Arduino escribe alto en el pin de paso de 500 micro segundos, retrasa y escribe otra vez repetidamente. El paso a paso penetra esta señal y activa las bobinas del motor paso en una secuencia para hacer girar el 1 paso.
El pin DIR es alta o baja dependiendo de qué dirección queremos que el paso a paso para girar.
Si su motor está flipando y todas las conexiones son correctas, que usted puede intentar cambiar a los 500 micro segundos a un valor superior e inferior en el código de arduino.
¿No funciona en absoluto o es el motor suena raro a hacer?
- Si se gira el eje del motor de paso a mano (desenchufe el primero) debe girar libremente y debe sentir "clicky", "clic" es un paso. Si no te podría tener un motor defectuoso.
- Revise las conexiones, conexiones, compruebe las conexiones.
- Revise la hoja de datos del controlador de paso. Compruebe primero si has conectado las fases correctamente. Compruebe si necesita a tierra uno de los pasadores de microstepping (MS1, MS2...). Compruebe si puede ajustar el voltaje en el conductor y hacer esto muy cuidadosamente, asegurándose de que sólo toque el tornillo de ajuste con el destornillador (arriesgando a cortocircuito el conductor si no eres cuidadoso). Por último comprobar si tiene un límite de corriente que de alguna manera se establece demasiado bajo.
- Cambiar el periodo de escritura en el código de arduino (500 Estados Unidos parte) o el tiempo de retardo después de la escritura.
- ¿Sigue sin funcionar? Comprobar con un multímetro o un osciloscopio si tienes acceso a uno. ¿Qué sucede entre el controlador y el motor? ¿Qué sucede entre el arduino y el controlador, son las patillas escribir correctamente?
- Eliminar todas las conexiones, una taza de café y montamos otra vez. (trabaja asombrosamente a menudo)
- Mandame un mensaje y voy a ver si me pueden ayudar.













