

La historia de nuestro autómata de araña insecto-catching va como esto: una araña gigante del mal reside en una red grande. Un día una señora desafortunado bug se retiene en la web y la araña miedosa lanza en él.
Subió con la idea de este proyecto de seis semanas juntos y discutieron posibilidades de implementación, particularmente con respecto a la araña en movimiento y detectar el error. Por ejemplo, aunque terminamos usando IR sensor para detección de error, se consideraron varias otras posibilidades incluyendo sensores al tacto y procesamiento de imágenes. En ese momento, la naturaleza altamente modular y reutilizable de los componentes del proyecto nos permitió construir por separado, y nos estamos posteando nuestro Instructable como una serie de dos partes.
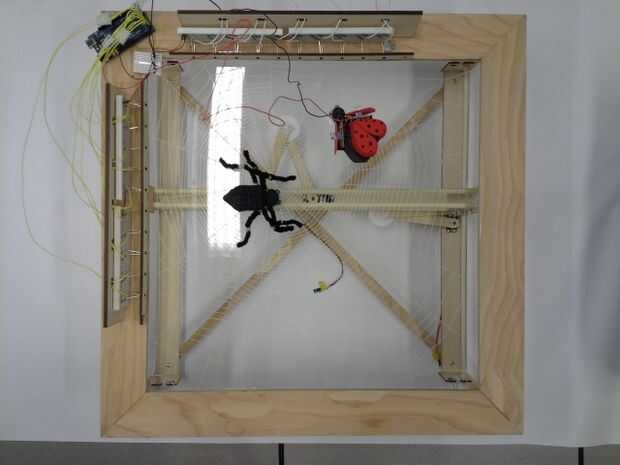
Parte 1, que se describe en este Instructable, muestra cómo construir los siguientes elementos:
* El marco a la que todo está conectado
* La tela de araña e iluminación asociado
* El motor de la araña, que es una tabla XY debajo de la web
Parte 2 muestra cómo construir los elementos restantes:
* El error
Detector errores
* La araña
Tenga en cuenta que debido a un plazo del curso, la parte 1 Instructable fue publicado antes de que la documentación estaba completa, así que ten continuas actualizaciones para los pasos posteriores.
Los lectores que quieran construir este proyecto deben tener en cuenta las siguientes limitaciones
La Mesa XY se mueve muy bien bajo el poder humano, pero no con los servos, y creemos que este resultado es consecuencia de los materiales no son lo suficientemente rígido. Es posible que añadir otro servo para mover el deslizador inferior de ambos lados sería útil también. Aquí están algunas tablas XY Instructables alternativos para tratar:
Bajo costo Hobby Servo XY mesa
Internet controlado por Arduino-ranura de T XY mesa
Router CNC DIY
Nuestra intención era poder mostrar la web en cualquier posición, como que se inclina contra una pared. Por esta razón, utilizamos imanes en la araña y el mover. Aunque esta idea funcionaba bien con modelos durante el pretesting, la araña final se aferra demasiado a la web y no se mueve bien. Por esta razón, le recomendamos una araña diferente / arrastre de conexión magnética motor, servos, así como más fuertes para ayudar a superar.
Se fija la orientación de la araña. Había discutido con un brazo giratorio en el mover de la araña, con el punto de giro hacia el frente de la araña, pero no la construyó debido a limitaciones de tiempo. Este brazo le habría permitido la araña que hacer a medida que avanzaba a lo largo de un arco trazado por el mover de la araña.







")


")


