Paso 1:
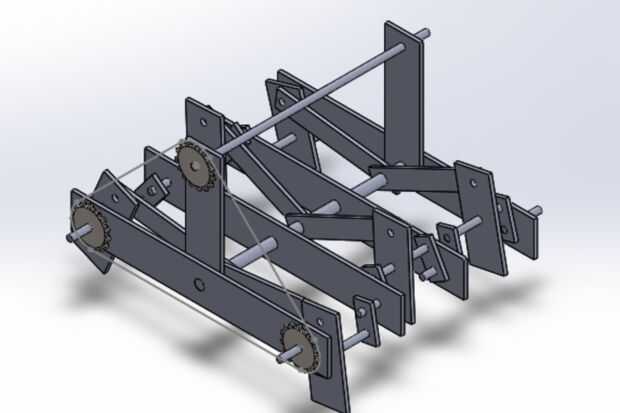
Estos seis patas se mueven sincrónicamente con varios angular
intervalos entre ellos para que dé un movimiento a pie al igual que un insecto de seis patas. Cuatro enlaces fijos rodean los vínculos y apoyan su movimiento. Realmente ocho de estos fijos de enlaces son necesarios con cada uno de la vinculación tiene dos de estas en cualquier lado. Como estos enlaces fijos, extender sobre al otro lado de la barra común se cuentan como cuatro. Cada una de estas funciones de vinculación como una pierna dando un movimiento de vaivén.
Cuatro barra acoplamiento es el acoplamiento cinemático de lazo cerrado; realizan una gran variedad de movimientos con algunas piezas simples. Este proyecto aborda el diseño y fabricación de un mecanismo de esa índole (cuatro barra mecanismo). En este proyecto de seis obras de cinemática del movimiento de la pierna
en principio de Grashof, que establece que la suma de la longitud de los enlaces más cortos y más largo debe ser menor o igual a algunos de los otros dos enlaces. Sin embargo esta condición es necesaria pero ni suficiente. Mecanismo de satisfacción de esta condición se caen en el mecanismo de la manivela del eje de balancín, doble mecanismo de manivela y mecanismo de doble balancín. Un marco, biela, manivela y palanca constituyen para obtener el movimiento requerido. En este proyecto hemos intentado Mostrar principalmente la aplicación del mecanismo de cuatro barras simples.











")

