Paso 10: Marco, cont.



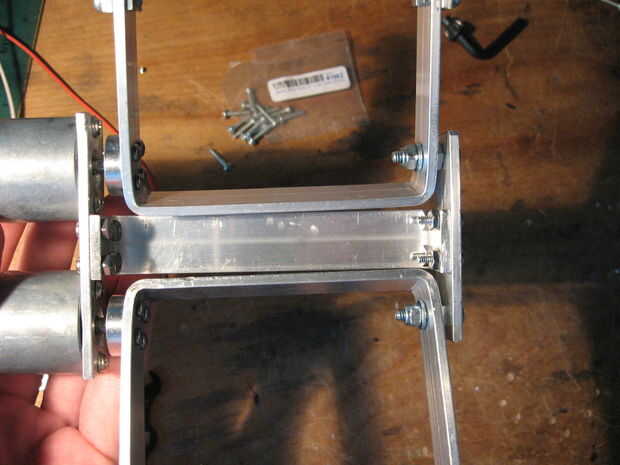

Doblar el aluminio en ángulo recto utilizando una abrazadera en c y perforar cuatro agujeros en cada extremo. Perforar orificios en la placa del motor y la placa opuesta cada ensamble de patas correspondientes y luego todo junto con 4/40 tornillos atornillados.
Una vez ambos segmentos del robot construido y estructuralmente, pude probar su capacidad de agarre de árbol por lo montan los motores directamente a una batería. Afortunadamente, funcionaron bastante bien, o hubiera tenido nada que compartir.

")











