Paso 13: Eje Motor
![]()
![]()
![]()
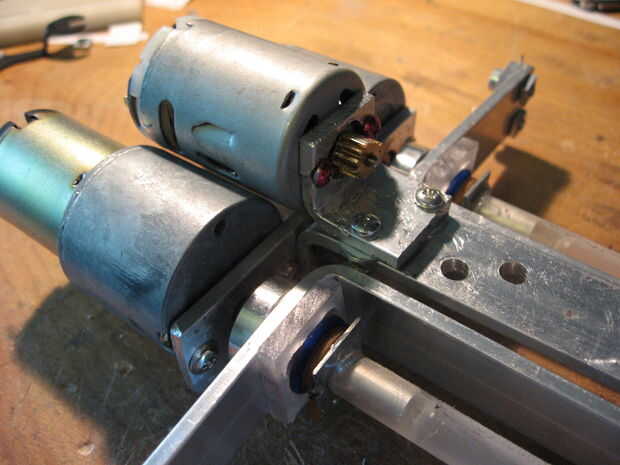
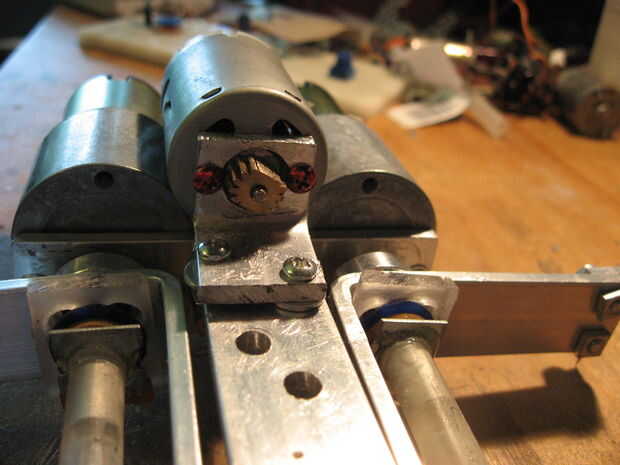
Para mover arriba y abajo de un árbol, el robot se extiende y se contrae haciendo girar un vástago roscado que se fija en el segmento superior. Cuando la barra se hace girar en sentido horario, se reunió a los dos segmentos y son empujados aparte cuando gira contra las agujas del reloj. Para hacer girar la varilla, necesitaba un motor de baja velocidad de torque relativamente alto que funcionaría a 12V, y me paso a buscar ese motor en mi caja de piezas. Este motor particular vino equipado con un engranaje de bronce. Para ayudar con acoplamiento del motor al eje de la roscado, presentó dos caras del engranaje plano.
Para montar el motor para el robot, doblado una longitud corta de aluminio a forma de "L". Taladré un agujero grande en el centro de una de las caras (para el eje del motor y el engranaje) y dos pequeños agujeros en ambas caras para empernar el motor para el metal y el metal se emperna al robot. Taladré agujeros correspondientes en la parte posterior de uno de los extremos del segmento del robot sin la electrónica, para que el motor fue colocado entre las dos piernas.


")











