Paso 17: Cableado del Robot

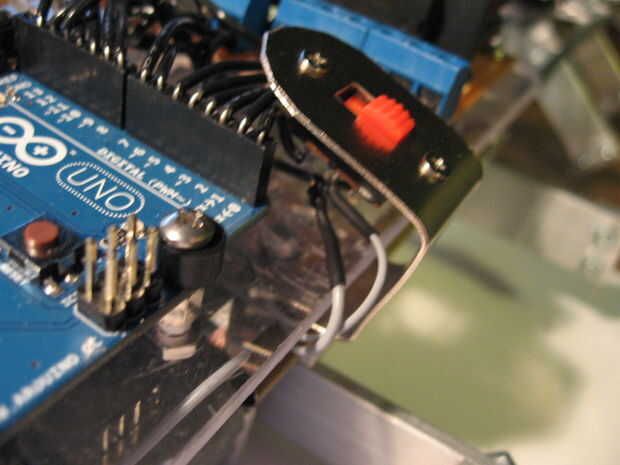
Ya que este robot es autónomo, necesitaba un método para controlar acciones del robot para que pudiera conseguirlo para liberar del árbol. Para esto, utilicé sólo un simple interruptor conectado a una entrada digital de Arduino
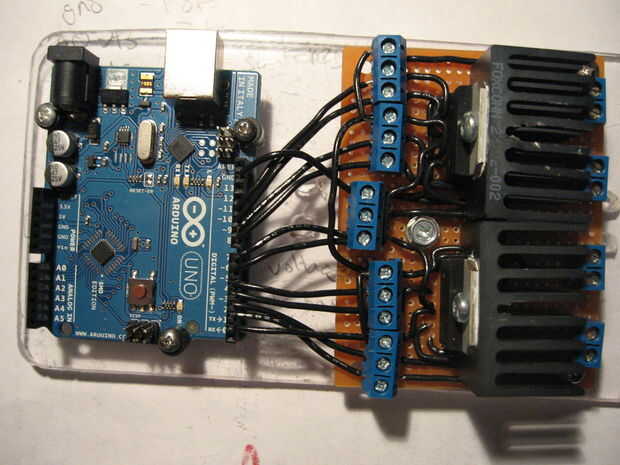
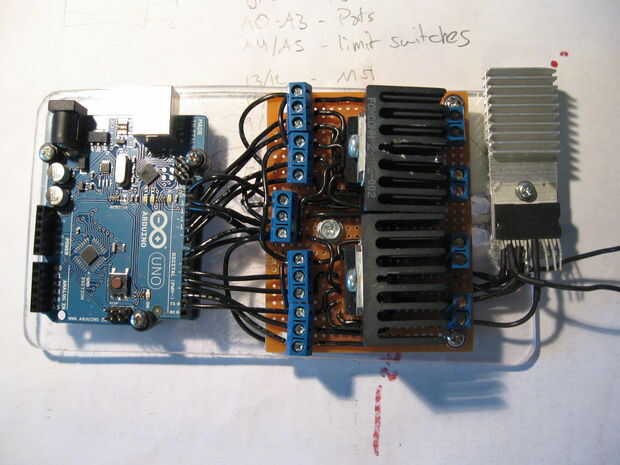
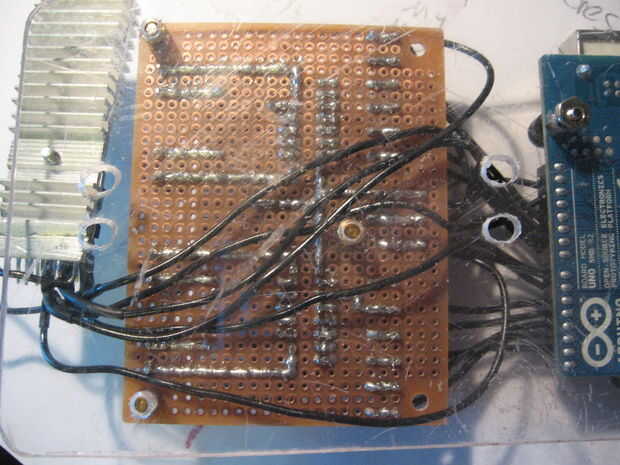
A continuación, alambré las clavijas de salida digital de Arduino a las entradas del controlador de motor. En primer lugar, conecté todo el motor que permite pernos en el controlador de motor a unos de otros. El resto de los cables fue como sigue:
- Activar motores
- Motor 4 entrada 2
- Motor 4 entrada 1
- Entrada de motor 3 2
- Entrada de motor 3 1
- Interruptor de control de
- vacío
- Entrada de motor 2 2
- Motor 2 entrada 1
- Motor 1 entrada 2
- Motor 1 entrada 1
- Motor 5 entrada 2
- Motor 5 entrada 1
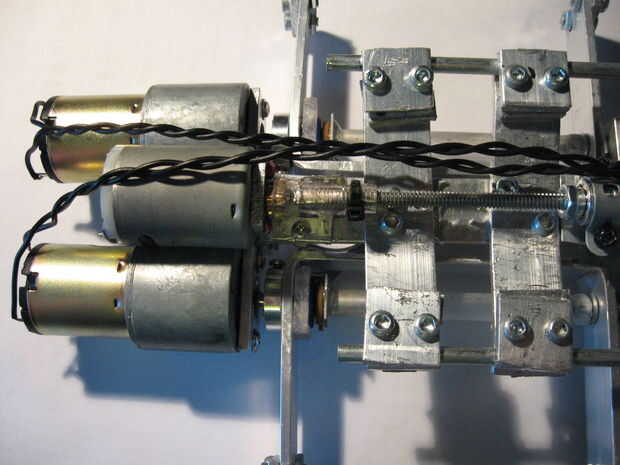
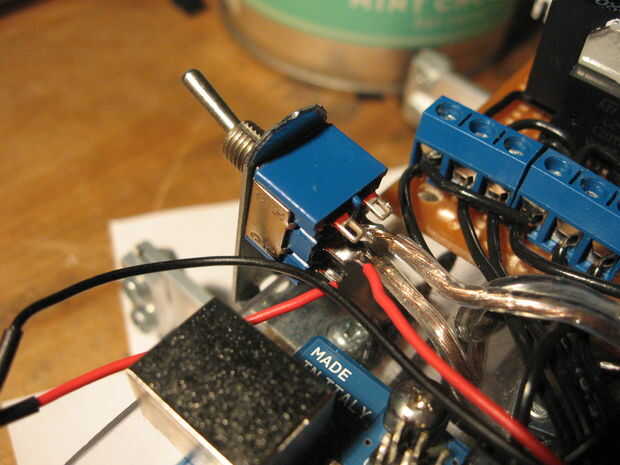
Luego había conectado los cables del motor a las regletas de terminales del controlador de motor y había conectado el voltaje terminal del motor a la batería de 12V, a través de un interruptor de palanca. Conecté el regulador de 5V a la terminal, vía el mismo interruptor de tensión lógica.
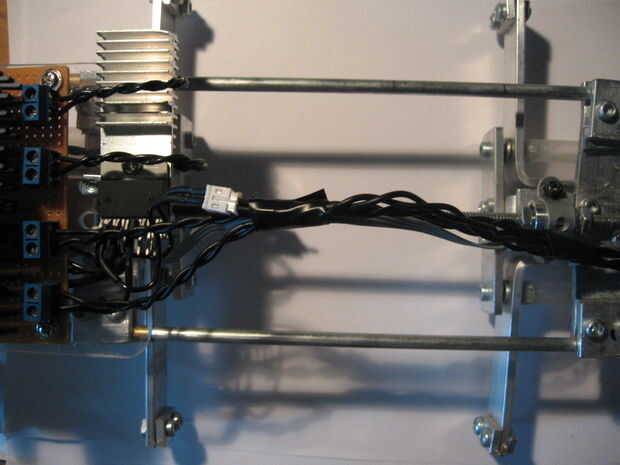
Recoge el cordón umbilical de los cables entre los dos segmentos del robot en un paquete y sujetado con abrazaderas de plástico y cinta aislante, para mantenerlas organizadas.

")











