Paso 18: Finales de carrera
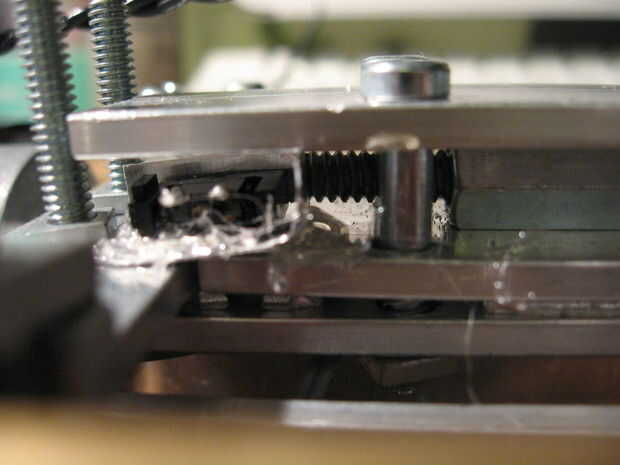
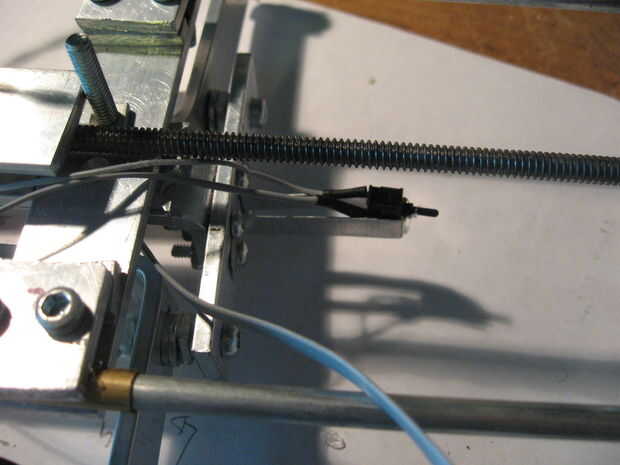
La columna vertebral tiene dos interruptores de límite. Uno es presionado cuando los dos segmentos del robot se tiran juntos, y el otro se convierte en no presionado cuando la varilla roscada se retrae más allá de ella. Este último es un cambio como este pegado paralelo a la varilla roscada, en el segmento del robot con la electrónica. Cuando la columna se retrae, empuja hacia abajo la palanca del interruptor, y cuando se retrae, el interruptor se abre.
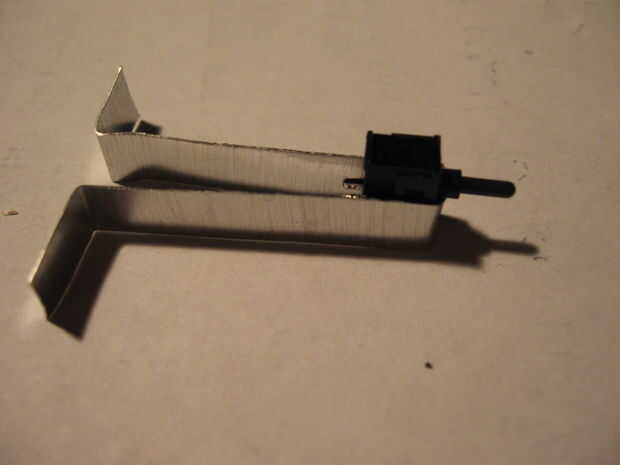
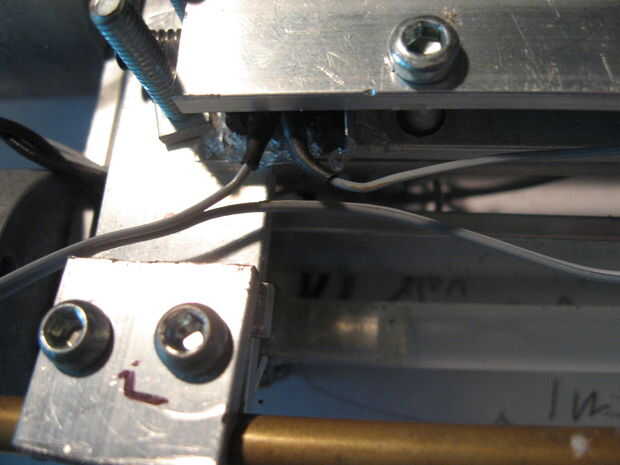
El segundo interruptor es un interruptor de pulsador que requiere muy poca fuerza para accionar. Había montado en una tira de aluminio de la parte delantera del segmento de la electrónica.
Tanto los interruptores están conectados a la misma línea de 5V y tierra como los potenciómetros en las piernas y sus señales de ir a las entradas de A4 y A5, que se lea como entradas digitales del Arduino, en lugar de analógica.

")











