Paso 1: diseño
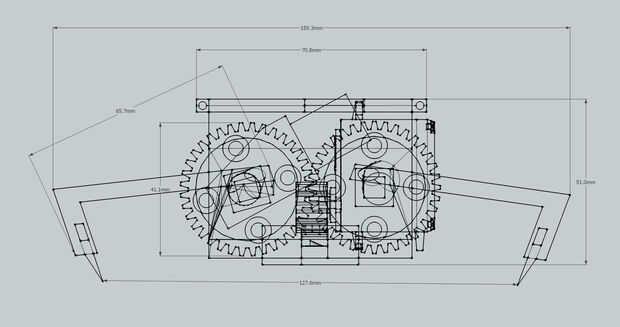
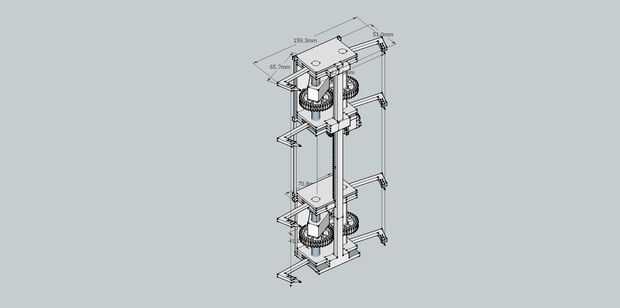
En mi diseño original (ver en las imágenes de arriba), las cuatro patas en cada segmento fueron controladas por uno altamente orientado motor. Decidí abondonar esta idea por varias razones. En primer lugar, no pude encontrar el tipo de engranaje de estímulo necesario para acoplamiento a las piernas. También, con las piernas Unidas entre sí, el robot tendría un momento difícil agarre superficies irregulares. Finalmente, decidí que el robot sería mucho más fácil construir los motores condujeron las piernas directamente.
El otro cambio significativo que hice de mi diseño original era la manera que trabaja la columna vertebral. En mi modelo, utilicé un tipo de estante y piñón sistema de engranaje para ampliar y contraer la columna vertebral. Sin embargo, no pude encontrar las piezas necesarias para construir un sistema de este tipo, así que terminé con una varilla roscada acoplada a un motor para accionar la columna vertebral.

")











