Paso 3: El controlador del Motor
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
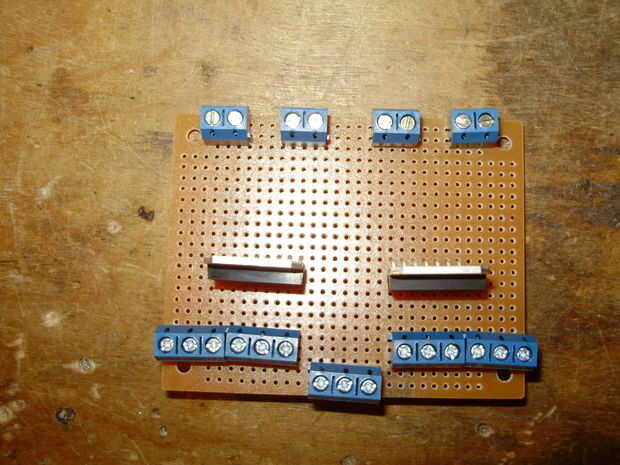
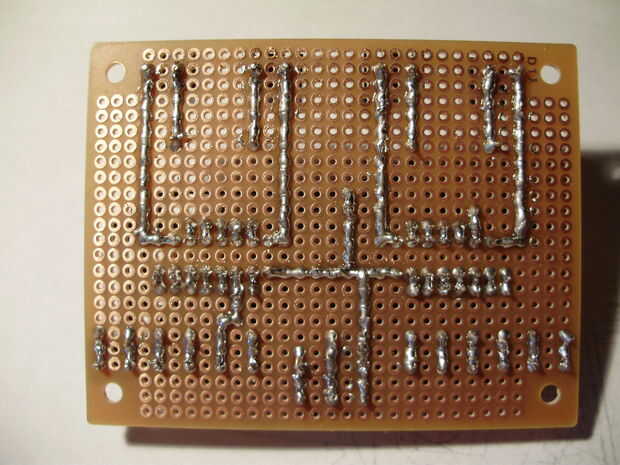
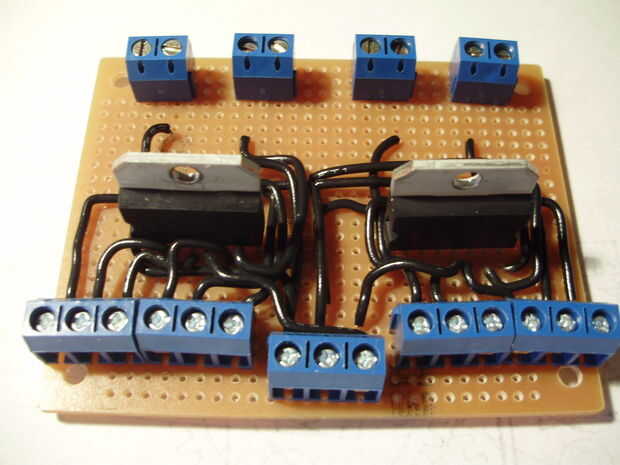
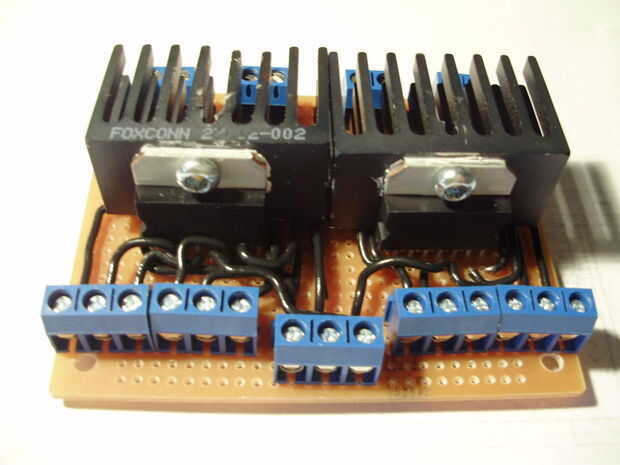
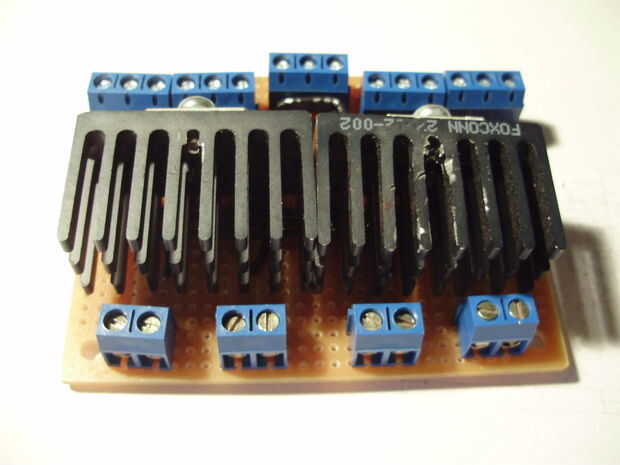
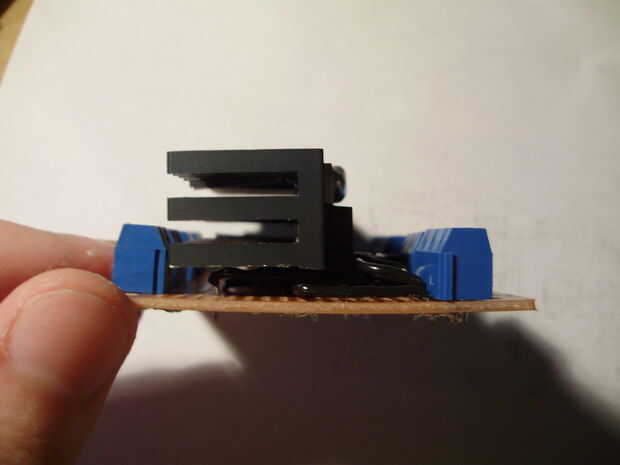
El regulador del motor he construido para este robot se basa en el chip de doble puente completo L298HN. Para usar el chip, he seguido la guía
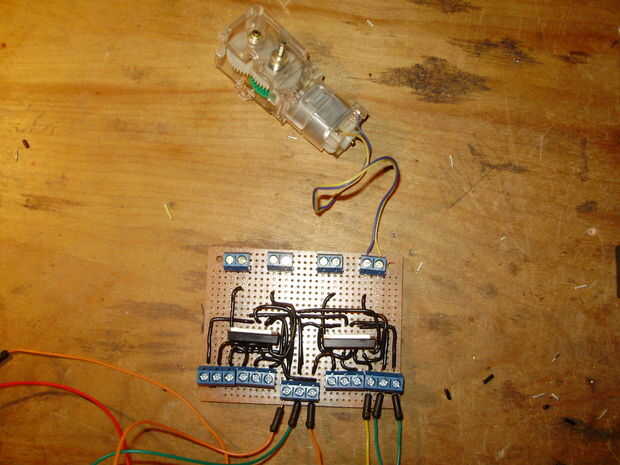
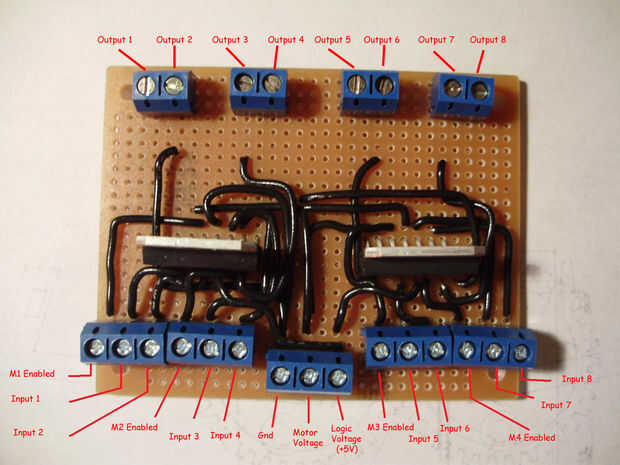
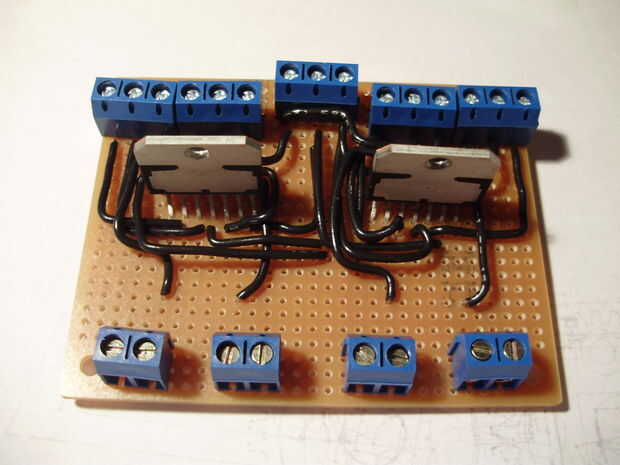
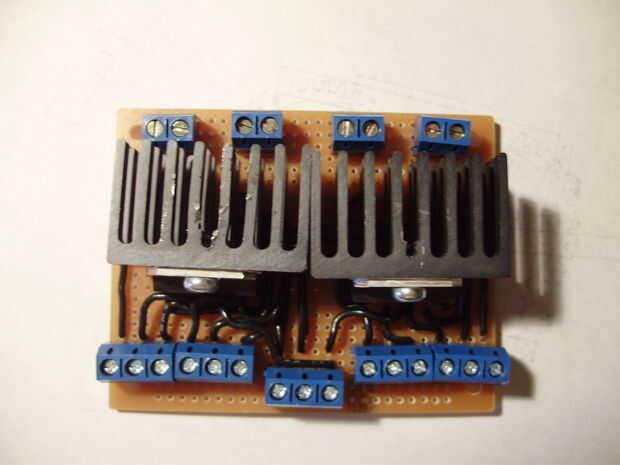
aquí. Para empezar, he puesto todos los componentes en un pedazo de tablero de perf, averiguar la disposición. Con este chip, cada motor requiere de tres insumos para trabajar: una señal de enable y dos señales de entrada. La señal de enable se utiliza para controlar la velocidad del motor con PWM, pero puesto que no necesito al control PWM, sólo con cable todos los bolos de activar en paralelo a una línea de 5V cuando conectado el controlador hasta el Arduino. Una vez me di cuenta de la disposición, soldar todos los componentes en su lugar y realizar conexiones con cable de núcleo sólido 22AWG. Por último, difundir algunos pasta térmica en la parte posterior de los L298 y atornillados a los disipadores de calor. Los disipadores de calor particular utilicé hicieron cortando por la mitad un disipador northbridge de una placa base del ordenador y perforación y roscado un agujero para el tornillo. Son probablemente mucho mayores de lo necesario, pero no hay nada de malo en tener sobre disipadores de calor de tamaño. Una mayor resolución de imagen de la Junta Directiva etiquetada puede encontrarse
aquí.
Cuando haya terminado, este regulador del motor debe ser capaces de forma bidireccional control 4 motores de la C.C. en hasta 2A cada (probablemente 2A continuamente, debido al tamaño de los disipadores de calor). Como puede notar, esto me deja un motor corto. Mi diseño original utiliza un servo para accionar la columna vertebral, pero tuve que cambiar mi diseño a usar un motor de DC. Para energía, yo por cable mi tercer chip L298 a un conector molex (así puedo desconectar el motor) y soldar los cables para las conexiones. No se ve tan bonito como mi controlador en un tablero de circuito, pero funciona.


")












{kind=link}