Paso 2: Montar la bandeja y sistema de inclinación





Decidí poner otro motor DC y un servo en él como un pan y tilt sistema que podría ser utilizado para apuntar lo que usted quería. El servo es controlado por Arduino y el motor de barrido es controlado por un interruptor DPDT que compré en el shack de radio para alrededor de dos dólares.
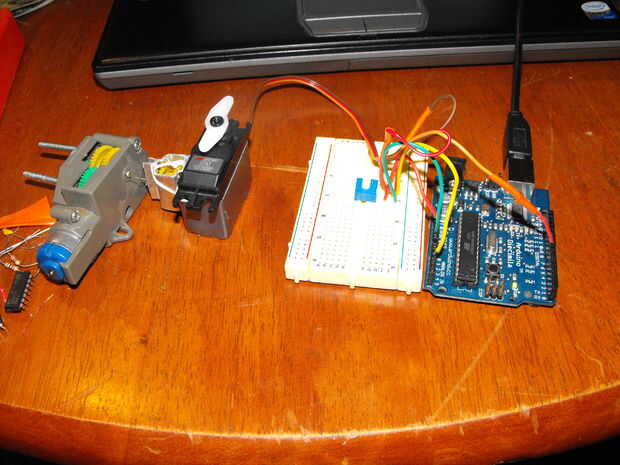
Para controlar el servo escribí algo de código en el entorno de software de Arduino que lee la caída de voltaje de un potenciómetro y se convierte en el ángulo que el servo debe ser trasladado a. Para implementar esto en el Arduino enganchar el cable de datos del servo a uno de los pines de salida digital del Arduino y el cable de voltaje positivo a 5V y la tierra del alambre a tierra. Para el potenciómetro deberá conectar los conductores exteriores de dos + 5V y el otro a tierra. Entonces, el medio plomo desde el potenciómetro debe conectarse a una entrada analógica. Entonces el potenciómetro actúa como un divisor de tensión con los valores posibles de 0V a + 5. Cuando Arduino lee la entrada analógica Lee de 0 a 1023. Para obtener un ángulo para funcionar que el servo en el divide el valor que estaba leyendo el Arduino por 5.68 para obtener una escala de 0-180 aproximadamente.
Aquí está el código que he utilizado para controlar el servo tilt de un potenciómetro:
#include < Servo.h >
int potPin = 2; selecciona la entrada de pin para el potenciómetro
Servo1 servo;
int val = 0; variable para almacenar el valor proveniente del potenciómetro
void setup() {}
servo1.Attach(8); selecciona el pin para el servo
}
void loop() {}
Val = analogRead(potPin); se visualiza el valor del potenciómetro
Val = val / 5.68; convertir el valor en grados
servo1.Write(Val); hacer que el servo a ese grado
Servo::Refresh(); comando necesario para que funcione el servo
}
Si necesita ayuda para trabajar con el Arduino igual entonces te sugiero altamente ir a www.arduino.cc su un sitio web de código abierto fantástico que es realmente útil.
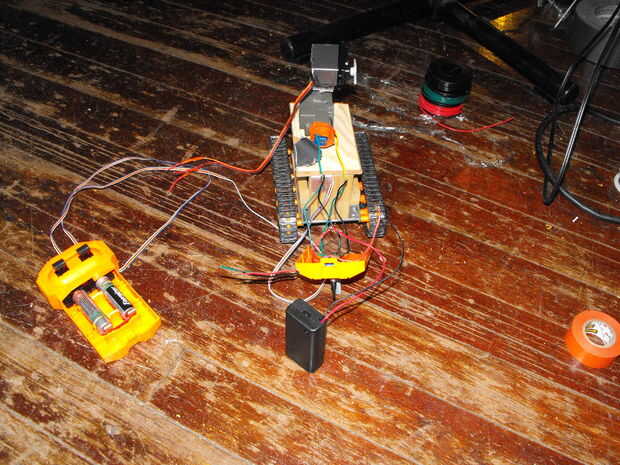
Así que después de probar el control de servo y el interruptor que necesitaba un lugar para ponerlas. Terminé usando una pieza de corte madera de desecho para sobre la misma longitud como Ard-e y atornillar en la pared posterior con una pieza de aluminio doblada en un ángulo de 90 grados.
Luego instalé el interruptor DPDT y el potenciómetro en el controlador. Fue un apretón apretado y tuve que perforar otro agujero en la parte superior de lo cables de pero en general funcionó bastante bien. También terminé de soldar los cables en los circuitos de control existentes para alimentar la caja de engranajes de gusano.
Muy probablemente debo han utilizado otro servo para el lavado pero la tienda hobby fui a sólo tenía uno de diez dólares unos y el motor pueden girar a 360 grados a diferencia del servo. Sin embargo, el motor es un poco demasiado lento.
Ahora a las pruebas.









")



