Paso 3: Pruebas y hacer la versión controlada remota de Ard-e

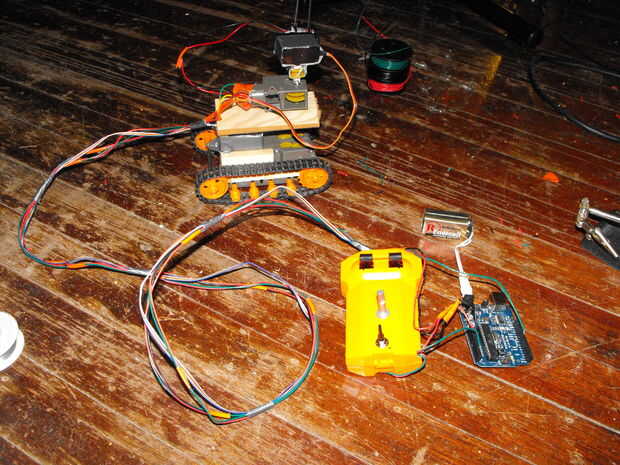


Ahora se debe probar para ver si todo funciona como se espera. Instale algo en el y sistema de inclinación como una cámara o led. He utilizado un láser zip atado al servo porque cabe muy bien y tuve una colocación alrededor. Ard-e todo y pruebe a apunte el láser a los ojos.
Cuando yo primero Ard-e puse el Arduino detrás del controlador y pegadas en su lugar. Con esta configuración cada vez que corrí los motores motoras o el motor de barrido servo iría a la posición de 0 grados. Al parecer el funcionamiento de los motores interfieren con el pulso de control de tiempo y hacen el servo pensar que iba a ser a 0 grados. Pensé que esto era probablemente debido a cuánto el control cable Ard-servo de café fue. Tenía para el funcionamiento de Ard-e para Ardunio detrás de la controladora mientras está en proximidad cercana a los cables llevan la corriente a los motores. Estos cables inducida por un montón de ruido en el cable de control y lo hizo ir a 0.
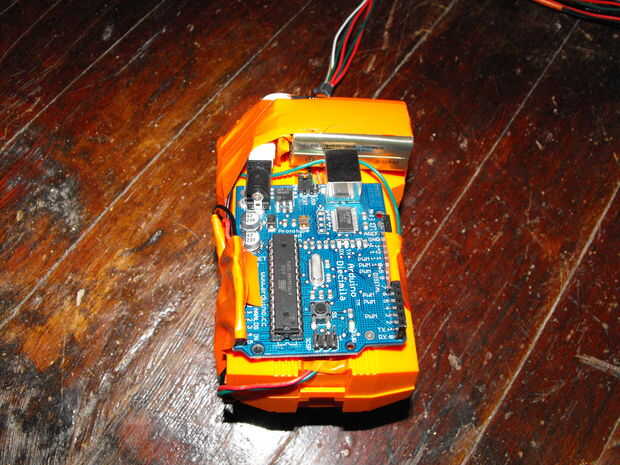
Para solucionar este problema me mudé el Arduino desde el controlador en Ard-e. Nota muy profesional buscando conducto cinta montaje de los servos y el Arduino. Esto elimina los cables del motor inducción de ruido y solucionado el problema. Los cables sólo desarrolla la energía y señal de potenciómetro en vez de la energía y señal de control para el servo. El ruido del motor los cables ahora afecta a la lectura del potenciómetro que no tiene poco o ningún efecto sobre el grado que el servo es conducido a.
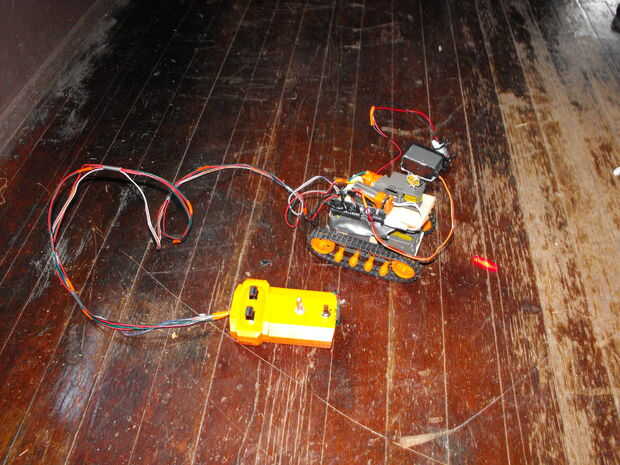
Así que ahora tienes la versión controlada remota de Ard-e. Básicamente usted acaba de hacer un punto y realmente fresco hogar construido coche que usted puede conducir alrededor en materia con el. El Arduino es subutilizado por lo menos. ARD-e ahora es usando 1/6 de su capacidad para percibir el mundo analógico y 1/14 de sus capacidades de I/O digitales. Podría ahorrarse algo de dinero y solo sacar el servo y Arduino si un hogar había construido coche es todo lo que quieras... Pero si quieres realmente hunden sus dientes en robótica leyendo sobre cómo hacer Ard-e impulsión sí mismo.









")



