Paso 8: Ard-profesionales robot sentidos: seguimiento de cuánto girar sus ruedas y viendo luz IR
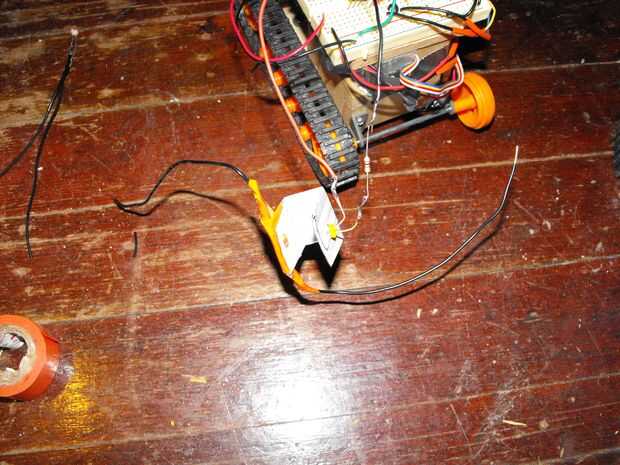
Para realmente construir el sensor usé mi fiel pedazo de chatarra y dobla un pedazo rectangular de él en forma de U. Taladré un agujero para montar en el lado de Ard-e y luego dos agujeros para los LEDs y el sensor de luz para adaptarse a. Había montado la Ard-e para que el led brilla a la derecha a través del centro de los agujeros en los peldaños hacia el sensor de luz. Puse el sensor de luz en la parte superior de la y luego poner alguna cinta aislante alrededor de los lados de usted para bloquear algunos de la luz ambiental que sería estropear las lecturas del sensor de luz. Entonces conecté los sensores de luz al igual que conecté para hacer sentido de Ard-e donde es la luz más brillante, como un divisor de tensión para una analógica de entrada (usando el mismo pines de entrada y resistencias como los "ojos" de Ard-e). El led fue soldado a una resistencia de tamaño para permitir que se ejecute fuera de 5V y luego conectado a la alimentación por el Arduino.
Mover la rueda manualmente y observando los valores que las salidas de Arduino usando el comando Serial.print() al serial monitor puede obtener un swing de 600 puntos en la escala de 0-1023. La baja es alrededor de 200 y el alto es de alrededor de 800. Intenté escribir un programa que utiliza 400 como la corte baja o alto valor y contadas las veces que conecta desde abajo a más de 400 pero fue más allá del alcance de mis habilidades de programación. Creo que fue porque estaba usando demasiado lento de la velocidad en la impresión de la serie y comprobación de los valores de los sensores y los peldaños estaban siendo hecho girar bastante rápido. Cuando intenté utilizar una velocidad más alta que no imprima en absoluto. En retrospectiva ni siquiera necesita los valores impresos. No pude conseguir el Arduino para leer correctamente los valores provenientes de los sensores como se hace girar las ruedas pero demostró que era posible usar este sensor para contar el número de veces que la banda de rodamiento interrumpe la luz de lo LED en el sensor de luz. Y si tienes un mejor programador que soy usted podrían convertir a este número a un programa de Ard-e a esa distancia y distancia.
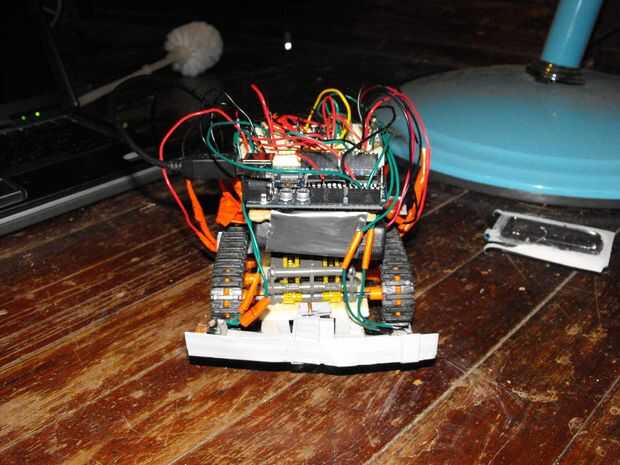
Otra de Ard-sentidos de robot de café que serían increíbles para él que está siendo controlado por un viejo VCR control remoto. Encontre un control remoto en la antigua pila de electrónica basura y encontrar un sensor de radiación infrarrojo en Radio Shack. Todo lo que necesita hacer es conectar el sensor de infrarrojos hasta el + 5V y tierra y luego la salida a una entrada de Arduino, así como dice en la parte posterior de la caja del sensor analógica. Otra vez si eres un mucho mejor programador que soy usted podría entonces programa Arduino para reconocer el IR la señal del mando a distancia y correlacionan con lo que Ard-e a mover. Pulsar la flecha arriba del control remoto marca Ard-e unidad hacia adelante, presionando la flecha hacia abajo del mando a distancia ir hacia atrás, etc.. Compró sensor de shack de radio, pero no han podido conseguir el Arduino para interfaz con él todavía.
Ahora Ard-café sentidos son completos! O por lo menos tan completo como puedo hacerlos. Por otra parte debe comenzar reciclando algunos trastos viejos para añadir como sensores para su propia versión de Ard-e. Ahora ¿Cuál es siguiente para Ard-e?









")



