Paso 3: Cableado del Arduino + pilas + motores







Cuando el tornillo de la primera capa (la plataforma que llevará a cabo el Arduino y Pi) necesita tener todos los cables de las baterías debajo de la "campana" de rover, usted tendrá que ocultar los cables junto a las baterías y asegurarse de que no enreden hasta con motores. Pero también se necesita para asegurarse que el botón que sobresale junto con el cable de potencia para el Arduino.
Después de poner la placa sobre las baterías necesita encontrar un lugar cómodo para tu Arduino a sentarse, porque queremos que ocupen el menor espacio posible. Una vez que encuentre un buen lugar para él, de alambre en los motores.
CABLEADO del MOTOR: Cuando usted alambre que asegúrese de que los motores se enchúfelos en los puertos correctos del escudo del motor. Se recomienda también para ocultar el cableado en el nivel superior del rover para que todo vea aseado.
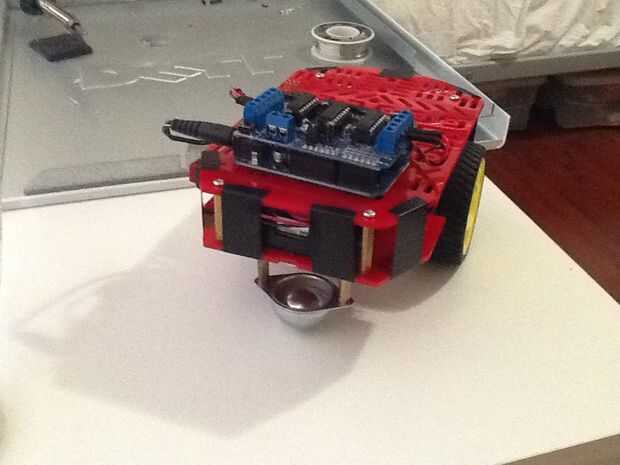
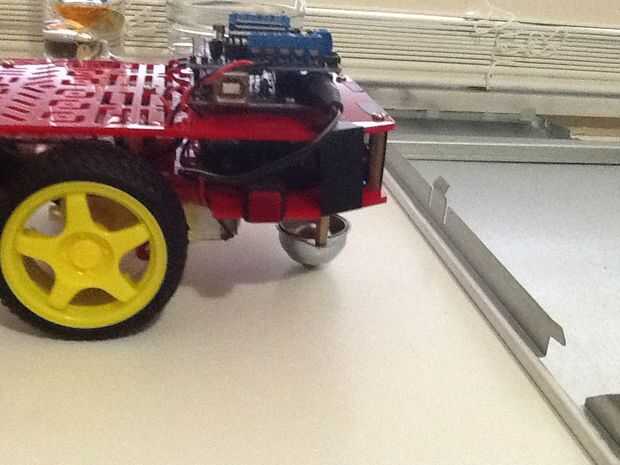
Las fotos de abajo muestran el cableado, asegúrese de seguir cómo se hacen las conexiones en el escudo del motor en la foto a continuación.
Ahora, me di cuenta de que la cubierta inferior del rover dejaron un montón de espacio abierto, así que decidí usar cinta aislante negra al estilo de la zona abierta y protegerlo cuando el rover está en movimiento.

 Stage1Model2")











