Paso 7: Software de diseño y calibración

El software(MTSAnemometer.zip) de Arduino conectado tiene que buscar transiciones alto-bajo en Digital 4, contarlos y luego la sesión al puerto serie del ordenador. El software determinará la frecuencia de datos de registro en la tarjeta SD. Este software está preparado para 2 muestras de segunda. Esto puede modificarse cambiando el valor de SampInterval.
Aquí le damos las partes importantes del lazo de software.
Calculadora buscar alto del viento
Si (digitalRead(WindPin)==HIGH)
{
SeeHigh = true;
digitalWrite (greenLEDpin, bajo);
}
Buscar baja así un alto a la transición de baja
else if (SeeHigh == true)
{
Contador de incremento
CntRPM ++;
SeeHigh = false; Volver a empezar
digitalWrite(greenLEDpin,HIGH);
}
Han transcurrido dos segundos
RPM=CntRPM*(60.0/SampInterval);
Explicación del código: Primero busco un alto en el anemómetro Digital 4 (Windpin). Cuando se va de alta, configurar SeeHigh true. Para propósitos de solución de problemas, apague un LED verde. Entonces cuando baja Digital 4 y SeeHigh se ha establecido entonces sé que el anemómetro había transición de alto a bajo y se ha producido una revolución (RPM). Para incrementar la CntRPM y también enciende el LED verde que puedo decir que está trabajando.
Han transcurrido dos segundos, multiplique CntRPM por 30 para obtener RPM (revoluciones por minuto).
Procedimiento de calibración:
Problema: ¿Cómo se determina cómo se relaciona la anemómetro RPM mph? Existen varias soluciones dependiendo de qué equipo usted tiene disponible. Voy a enumerar tres. Todos ellos requieren que usted tenga una manera de mostrar RPMs desde el Arduino. Mi código de Arduino mostrará datos a un ordenador o portátil conectado al Arduino con el USB. Si no tienes un ordenador portátil, una alternativa sería reescribir el código para mostrar los datos en una pantalla de LCD.
Requisitos de hardware: Su ordenador portátil tendrá un puerto USB o dos. Mi viejo portátil sólo tiene un único puerto USB 1.0 pero funciona bien con un hub USB.
Los requerimientos de Arduino: Instalar mi código de Arduino en el Arduino. Conectar el Arduino con el ordenador portátil puerto USB.
Instalación de anemómetro: Pegué el montaje del anemómetro en la ventana abierta de la puerta del asiento trasero de mi coche. La parte inferior de la PVC fue pellizcada entre el asiento y la puerta. O usted podría ser capaz de poner en la ranura de la puerta que se cierra la puerta con. Mis asientos tienen manijas arriba para todos los asientos ayudar a entrar y salir. Tomé una cadena, colocar alrededor de la manija y el PVC para mantener vertical el anemómetro. Si el PVC está tocando alguna parte vulnerable del coche, poner algo entre como un paño suave. Cierre con cuidado la ventana parcialmente. (Ver imagen) Conecte los sensores en el Arduino.
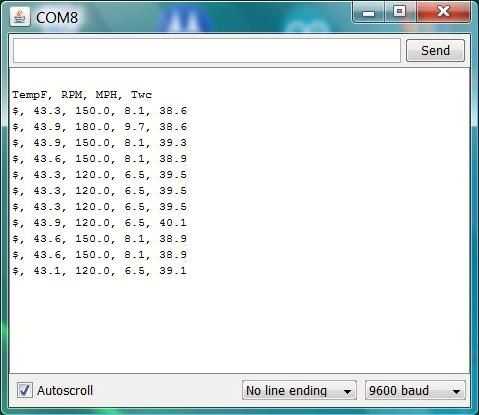
Solution1: Si tienes un portátil y un coche, ejecutar el software de terminal serial a 9600 baudios. (Ver pantalla de salida de muestra)
Seguridad primero: Idealmente, esto debe hacerse con una segunda persona para ayudar. En un día sin viento, tomar una carretera desierta, plana y recta y control de crucero para un conocido MPH. Un problema típico es que la mayoría de velocímetros estén apagados. Puede comprobarlo buscando alguna carretera marcadores de millas y descubrir que en realidad tarda ir una milla en una supuesta velocidad.
Ver qué es RPM en el terminal de la serie de Arduino. (El terminal de la serie también muestra MPH y Twc pero estos valores se basan en mi calibración de anemómetros). Tomar conocido MPH del coche y dividirlo por el número de revoluciones y enchúfelo en el código de Arduino. Aquí está el código de Arduino. Reemplazar.054 con su cálculo.
MPH = RPM*.054; Valor de calibración
Solution2: Si tienes un portátil y un coche y un standalone GPS, ejecutar el software con un terminal de serie.
Seguridad primero: Idealmente, esto debe hacerse con una segunda persona para ayudar. En un día sin viento, escoge una carretera desierta, plana y recta y ajustar el control de crucero. Tomar el MPH de su GPS y dividirlo por el número de revoluciones y enchúfelo en el código de Arduino como el anterior. Por cierto, también se puede determinar cómo lejos está el velocímetro del coche. Si el GPS lee en nudos por hora, multiplicar por 1,151 para obtener millas por hora.
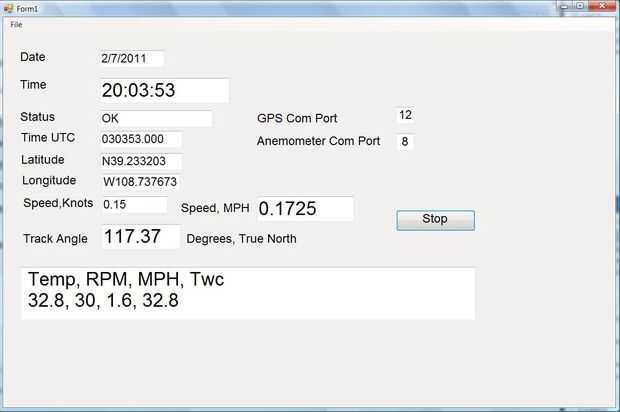
Magazine3: Tengo un portátil y un coche y un GPS NMEA que se conecta a mi portátil USB. Había conectado el Arduino y el GPS a mi laptop y funcionó mi software VB Express. Ver anexo. Este programa debería funcionar con cualquier Arduino y un GPS compatible con NMEA de USB. La mía es una USGlobalSat BU-353.
Para instalar el software de calibración, copiar cpublish.zip a un directorio en el portátil, lo descomprimimos, asegúrese de que usted tiene una conexión a Internet y ejecuta la instalación.
También tendrás que instalar al driver USB para el GPS.
Mi configuración del programa requiere que los números de puerto com del USB para el GPS y el Arduino. Estos aparecen en Administrador de dispositivos, en los puertos. Mi GPS se llama prolífico. Mi Arduino aparece como USB Serial Port.
Si tienes algún problema, mi GPS Instructable tiene algunos consejos más.
Iniciar mi programa (véase el cuadro), enchufe en los números de puerto com correcto. Haga clic en el botón actualizar. Debería ver los datos GPS mostrando y los datos de Arduino en la parte inferior.
Seguridad primero: Idealmente, esto debe hacerse con una segunda persona para ayudar. En un día sin viento, escoge una carretera desierta, plana y recta y ajustar el control de crucero. Ahora mi programa es automatizado para que reciba el MPH (convertido de NMEA nudos por hora) desde el GPS y el RPM de Arduino. En realidad, he probado varias velocidades diferentes. Anote los tiempos cuando usted estaba manejando con el sistema de control de crucero.
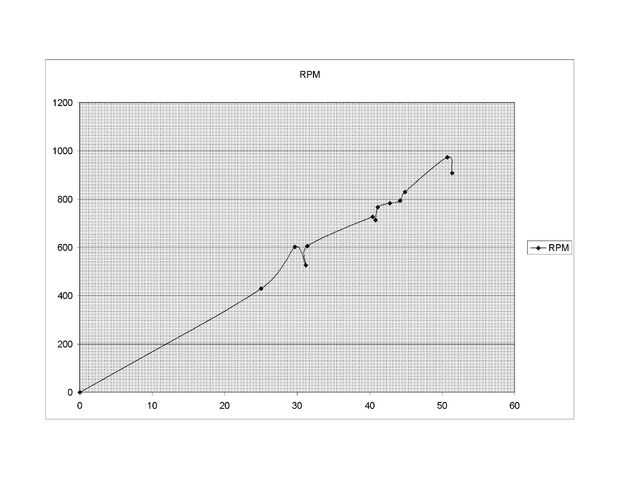
Volver a mi programa, haga clic en guardar archivo (ignore los mensajes). Escriba un nombre de archivo y tenga en cuenta la ubicación del archivo. Mi programa guardará los datos de a una. CSV archivo así que trazan los datos a un gráfico de Excel (ver imagen). Esto muestra una relación bastante lineal. Se toma una muestra MPH de su GPS y dividirlo por el número de revoluciones y enchúfelo en el código de Arduino como el anterior. Usé esto para determinar el multiplicador.054 se muestra en el programa.
Si no tienes Excel, también se puede utilizar gratis Google Docs u Open Office. La gráfica trazada de algunos MPHs diferentes parece bastante desigual pero es bastante lineal. (véase el gráfico)
Para verificar su calibración, carga el Arduino con su calibración y vuelva a ejecutar la prueba anteriormente indicada. El Arduino MPH debe ser cerca de MPH 'real' pero probablemente saltará por encima y por debajo de ella.












")
