Paso 4: Código Final para el corte de señal
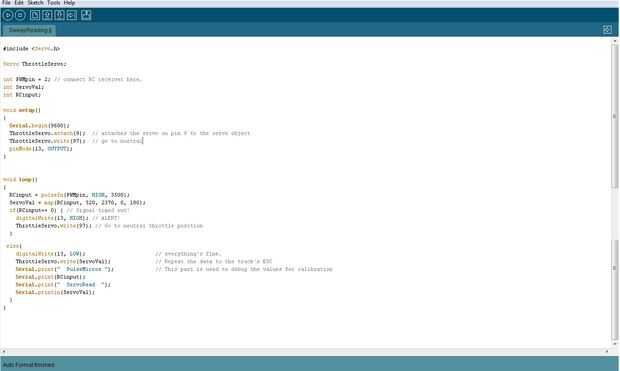
Servo ThrottleServo;
int PWMpin = 2; Conecte el receptor RC aquí.
int ServoVal;
int RCinput;
void setup()
{
Serial.Begin(9600);
ThrottleServo.attach(9); se fija el servo en el pin 9 al objeto servo
ThrottleServo.write(97); ir a nuetral
pinMode (13, salida);
}
void loop()
{
RCinput = pulseIn (PWMpin, alta, 20000);
ServoVal = mapa (RCinput, 520, 2370, 0, 180);
if(RCinput== 0) {/ / señal agotado!
digitalWrite (13, HIGH); ALERTA!
ThrottleServo.write(97); Ir a la posición neutral del acelerador
}
Else {}
digitalWrite (13, bajo); todo está bien.
ThrottleServo.write(ServoVal); Repetir los datos ESC del camión
Serial.Print ("PulseMicros"); Esta parte se utiliza para depurar los valores de calibración
Serial.Print(RCinput);
Serial.Print ("ServoRead");
Serial.println(ServoVal);
}
}



")




")

 para coche RC casero.")


