






Un robot se define como un agente mecánico o virtual inteligente que puede realizar tareas automáticamente o con dirección.
Un robot es típicamente un electro-dispositivo mecánico que se rige por computadoras y programación electrónica.
Así que decidí probar mi mano en robótica, y lo que hizo un llamamiento a mí más era el bípedo ya que implica movimiento y equilibrio. Este Ide para ser capaces de incorporar servos y acelerómetros.
El bípedo Final es un Arduino patas dos control accionado por robot con 8 grados de libertad (DOF) y la retroalimentación de acelerómetro.
Esta es mi primera vez usando Arduino, servos y acelerómetros, así que esto no puede ser la mejor manera de ir sobre el robot final pero parece estar funcionando como se pretendía.
Fuentes:
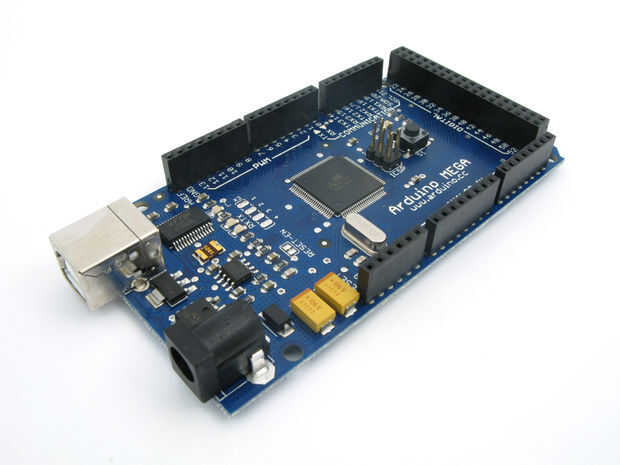
Después de mucho investigar me decidí ir con Arduino pues tiene bibliotecas de Servo que facilita mucho la vida. En lugar de crear 8 diferentes PWM (modulación de anchura de pulso) señales para cada servo, uno sólo puede establecer la rotación utilizando un solo comando. (Voy a publicar más adelante el código). Fui con Arduino es la MEGA250 que tiene 14 pines PWM, Im sólo con 8 para los servos, también más que suficientes entradas analógicas para el acelerómetro.
El Arduino no viene con un cd de instalación para que el software se puede encontrar en el siguiente enlace:
Que no viene con el cable USB.
Tienes que instalar los controladores de Arduino, vienen con la descarga. Una "cómo" debe ayudar la búsqueda de google.
Los servos que utilicé son HD-1501 MG que tienen el par mínimo que sugeriría para un bípedo de este tamaño como lucha en algunas posiciones. Compré 8 de microrrobótica. Aquí está el enlace al producto, también puede ver las especificaciones:
En cuanto a precisión, probablemente no son la mejor opción, pero nada más high-end era demasiado cara teniendo en cuenta que necesitaba 8.
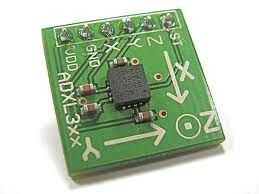
El accelerometre es un ADXL330 que recogí de un proyecto. Un giroscopio de un mando de WII rota funciona bien también.
La estructura del BOT es metacrilato, corte de una sola hoja y los bordes redondeados.
Utilicé muchos tornillos y tuercas y una pistola de pegamento para mantener Unidas.
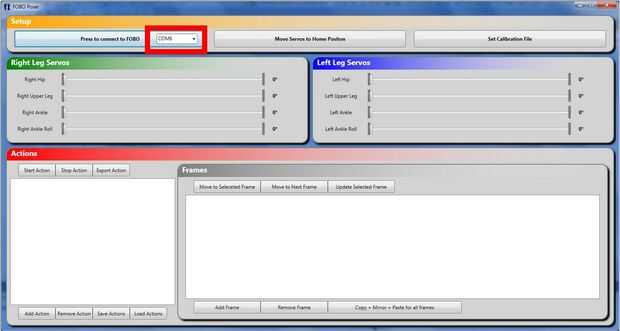
Un ejemplo de un bípedo con comunicación serial, también tiene una GUI agradable que adapté para trabajar con la mía:
http://www.projectbiped.com/Prototypes/Fobo
Un proyecto similar, que el código como una plantilla para mi código:
http://Lars.Roland.bz/biped-Arduino-robot/
Un buen tutorial sobre cómo obtener el robot caminando:
http://www.youtube.com/watch?v=Xhz6m6fu494








")




")