Paso 2: Montaje de los componentes






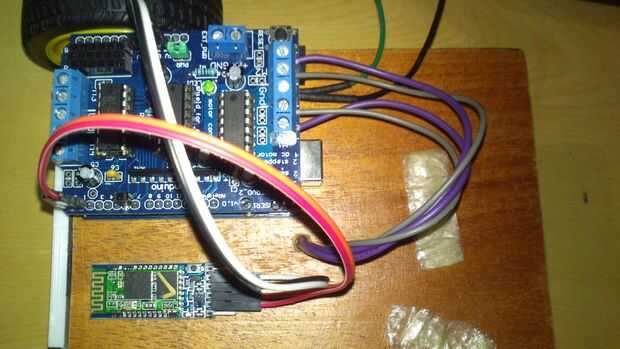
Ahora que tenemos todos los componentes a que nos conectamos el escudo del motor la Arduino.I hizo un pequeño truco para conectar el pin RX y TX con el escudo del motor porque mina no tienen pines hembra. Tomé dos cabezales de perno femenino de la pequeña y soldadas a mi escudo del motor.
A continuación tenemos que montar el Arduino a la base del coche y luego montar el escudo motor en la parte superior. Montar el módulo de Bluetooth en la base de recordar los pines Vcc, GND, RX y TX señalando hacia abajo.
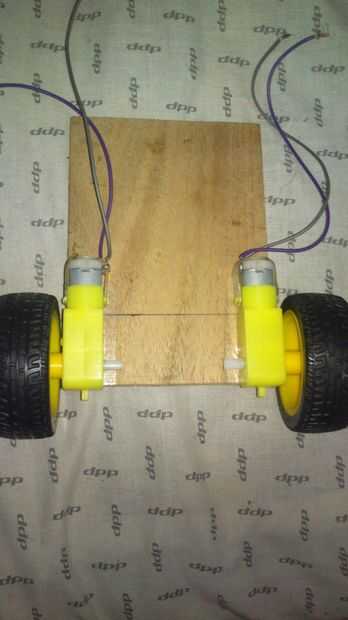
Montar la rueda de omni en la base y las ruedas del robot motor dc también.
Conectar los motores a los puertos del escudo del motor M1 y M2.
Después de eso Conecte el pin RX del módulo al pin TX del Arduino y el pin TX del módulo al pin RX del Arduino.
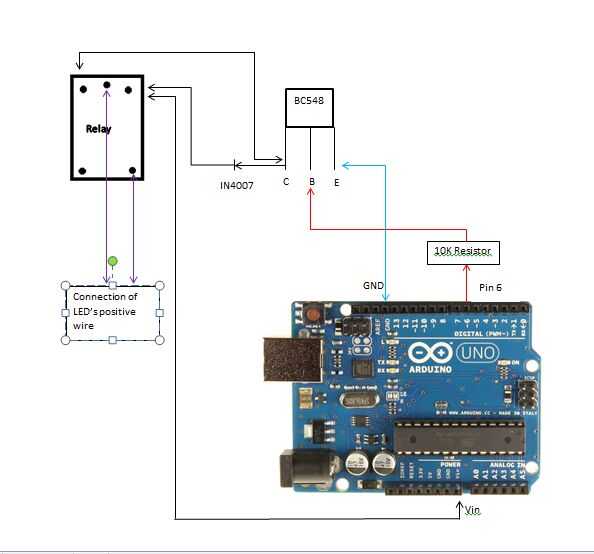
Por último Conecte el circuito de relais que hice para pin digital 6 así que podemos cambiar en el frente de luz a través de Bluetooth.


")
")


")



")
")
")
