Paso 5: Instrucciones de construcción







RUEDA
1. crear un eje de transmisión por epoxying un 5/16 en contratuerca hexagonal en el centro de la rueda. Deje el epoxi hasta que esté completamente seco!
2. para el pasador central, toma 5/16 en perno en el espaciador negro grande de maleficio y asegúrelo con una tuerca. Añadimos una arandela y otra tuerca en el perno.
3. el cuerno de servo de punto seis a la parte superior del espaciador negro grande de epoxy y dejarlo completamente seco. Se trata de cómo se conecte el servo al perno.
4. ahora todo atornillar y conectar el servo.
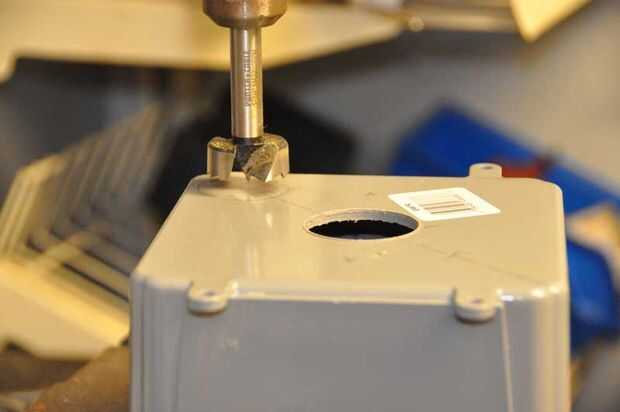
CAJA
1. mientras el epoxi está secando las piezas de la rueda, perfore agujeros en la caja de envase centrada en donde la rueda apretones y servo vendrá a través de.
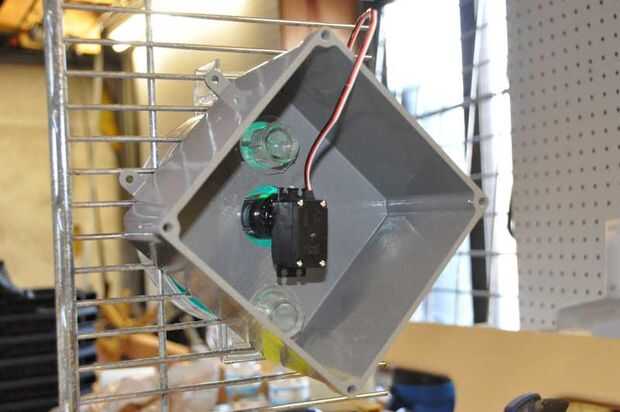
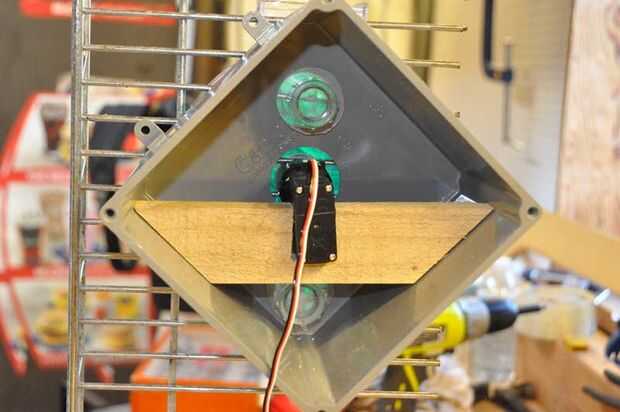
2. para asegurarse de que el servo se fija hacia abajo, cortar un trozo de madera para sentarse dentro de la caja con un hueco cortado a través para que el servo en.
3. Fije abajo de la placa Arduino en el interior de la tapa para fácil acceso. He utilizado pegatinas de Velcro para que la Junta podría ser quitada y colocada hacia atrás fácilmente.
TIRE DE LA PALANCA
1. perfore un pequeño agujero a través de la palanca para pasar el botón y fijarlo.
2. taladre un orificio en la tapa de la caja para su Baldeador a través y asegúrela firmemente. Asegúrese de que el lado del botón está en el interior de la caja.
3. cuando la palanca se tira hacia arriba, el botón será empujado en el lado de la caja de arranque el servo. Una vez que se suelta la palanca, el servo se detiene.
SISTEMA DE POLEA
1. usé un trozo pequeño y delgado de madera con dos rodillos de puerta de pantalla atornillados a cada extremo para dirigir el tiro.
2. en el extremo de la cuerda que estará en el interior de la jaula os adjunto hilos de mastique y algunos silbidos, que gustan jugar con mis aves. El otro lado de la cuerda os adjunto a la tire de la palanca con un contrapeso.

 + Bonus")











