Paso 3: movimientos
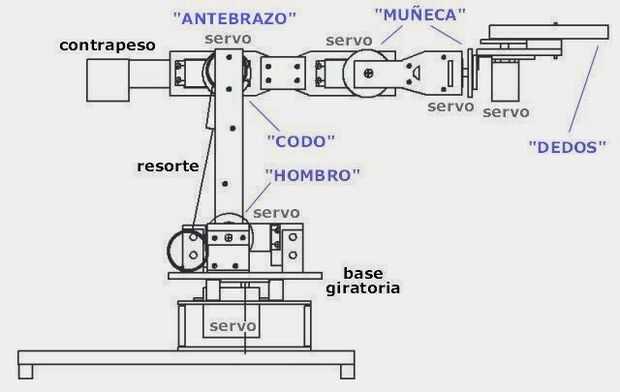
una base giratoria
un motor cinemático en el "hombro"
un motor cinemático en el "codo"
dos servomotores en la "muñeca", uno para mover arriba y abajo y uno para la rotación izquierda y derecha.
Y un sexto motor servo en la pinza de manipulación.
He realizado diferentes diseños de las distintas partes, y les presento son las más "lograda", el resultado de mucho "ensayo y ensayo. Ahora parece que la estructura real de un brazo industrial.
La longitud de la sección que va entre el codo y la muñeca es casi igual a la longitud de la "mano" que permite un buen equilibrio; y para ayudar a poner resortes en el codo para tener un buen equilibrio de pesos y así ayudar a los servomotores.
El hombro de servo tiene el "refuerzo" de un resorte cuando el brazo se inclina hacia adelante.










 con pfodApp")


