Paso 2: El candy grabber



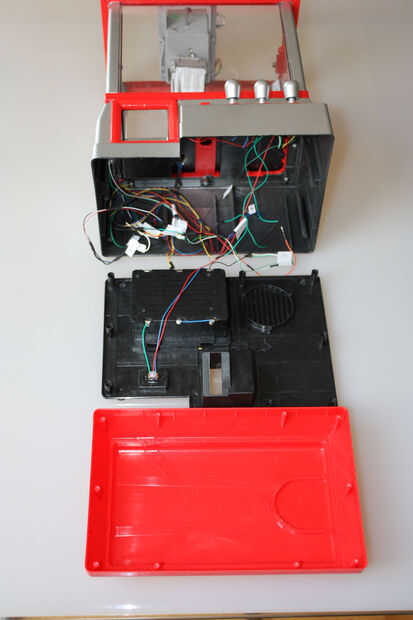
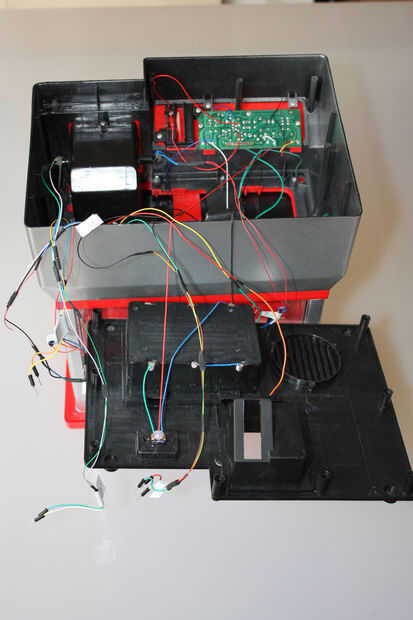
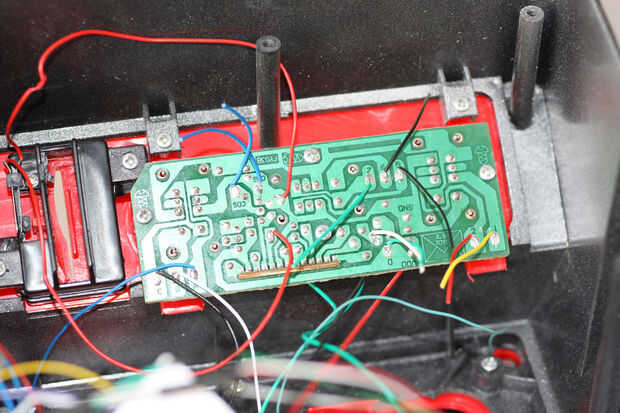


Así que para conectar el arduino y el juguete tenemos que abrirlo y sacar la tripa. Utilice un destornillador y desenrosque la parte inferior y superior del juguete. Mirando la parte inferior verás un montón de cables conectados a un PCB. Ahora el multímetro viene a jugar. Se usa para saber cual cable es para qué. Pueden encontrar un estupendo tutorial de cómo usar un multímetro aquí (http://www.ladyada.net/learn/multimeter/ ).
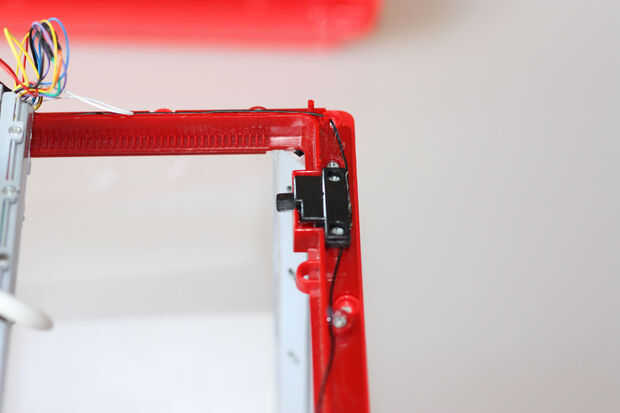
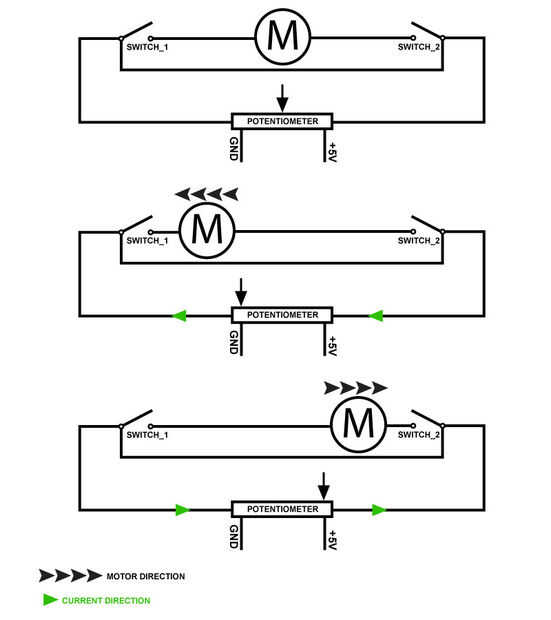
Hice un diagrama de cómo el motor y los interruptores de límite son conectado (cuadro 12). La cosa es que el joysticks(potentiometer) cambia la polaridad en los interruptores de motor y límite mientras la empuja de un lado a otro (de hecho que no estoy totalmente seguro que los joysticks son potenciómetros porque no pude encontrar las hojas de datos de este tipo de potenciómetro. Si alguien sabe lo que son mándenme un comentario). Más tarde tendrá que separar el motor de los interruptores por cortar los cables que van desde los interruptores del motor (Foto 1). Por ahora permite encontrar justo lo que es.
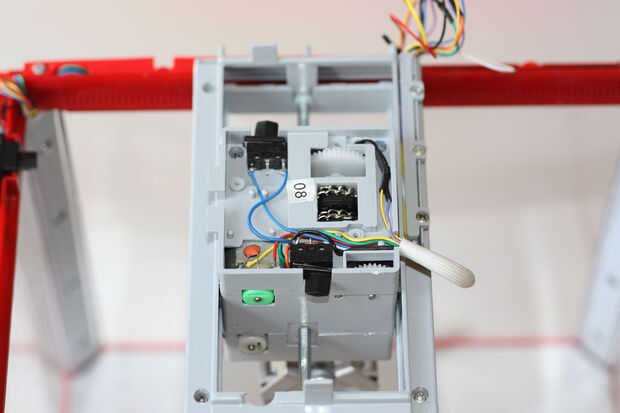
Energía, inserte una moneda y pulsar el primer éter joystick forma y mantenerla. Ahora empezar a sondear los cables en pares para el voltaje. Empezar con los más cercanos a la palanca de mando. Tenga en cuenta que cuando se alcanza el tope del eje particular cortará la potencia del motor. Si están sondeando el hallazgo del eje X es interruptores de límite (cuadro 8 y 9). En la placa los cables de conmutación deben ser cerca de la palanca de mando (cuadro 7). Debe haber tres cables de 2 interruptores de eje. Uno es + 5V y el GND otros dos. Cuando encuentres los correspondientes cables de interruptor apague el juguete y empezar a sondear los cables de continuidad. Comience con dos cables y luego oprima el interruptor de límite para el eje correspondiente de la parte superior. Si pierdes la continuidad es uno de los conmutadores. Etiquetar como SWITCH_1. Etiquetado cosas hará mucho más fácil más adelante. Ahora seguir y encontrar el interruptor opuesto y etiquetar como SWITCH_2.
Ahora repita el proceso para el otro eje etiquetado los cables SWITCH_3, SWITCH_4.
El último motor que controla el movimiento de arriba-abajo de la mano de acaparamiento no tiene un interruptor de límite, así que sólo tienes que encontrar 2 cables del motor.
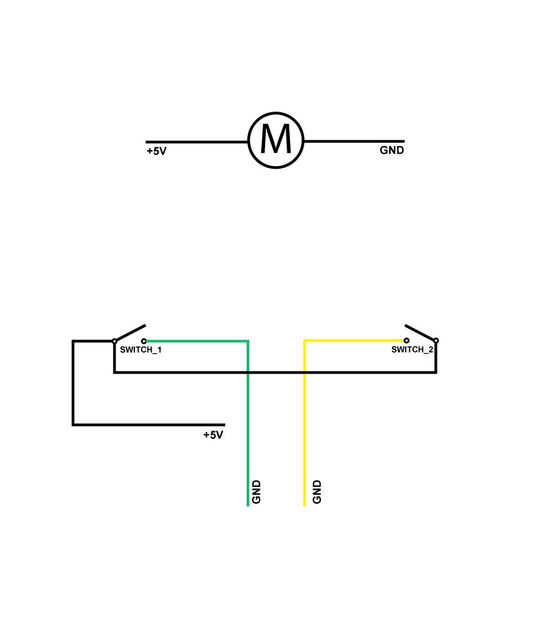
Cuando sepas qué interruptor es bruja, puede abrir el carro motor (imagen 11) y cortar el cable del eje X que van desde el primer interruptor para el motor y el cable que va desde el motor hasta el otro interruptor de límite. Conecte los cables que van desde el primer switch al segundo. También debe conectar dos cables de cada cable del motor y la etiqueta como AXIS_X. repiten el proceso para el eje Y y los cables del motor de la etiqueta como AXIS_Y cuadro 13 es el diagrama de cómo el motor e interruptores deben conectarse después de que les ha cortado.
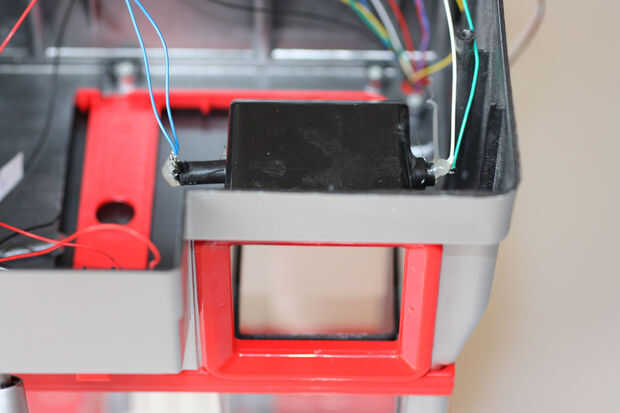
A continuación se encuentra el LED y el sensor de luz (imagen 14). Lo utilizamos para activar un evento en arduino que envía un mensaje al cliente que ganó. Se montan en el lado de la rampa donde colocar las cosas que se agarraron. Llevarlos a cabo y reemplazarlos con un LED IR y photointerupter. El problema fue cuando el sensor de luz la interrupción arduino dispararon al azar y poco a poco, así que decidí usar el photointerupter y el LED IR en su lugar. Si su photointerupter es de un ratón y tiene 3 pines es seguro suponer que el pin central es el pin de 5V y los otros dos son pines de tierra. Estos photointerupters en realidad tienen dos photointerupter. Es porque necesitan dos valores para calcular la posición y la velocidad del ratón. Se llama codificación de cuadratura. Utilizaremos sólo uno. Así que soldar un cable a los pines de 5V y el otro a un pin GND.
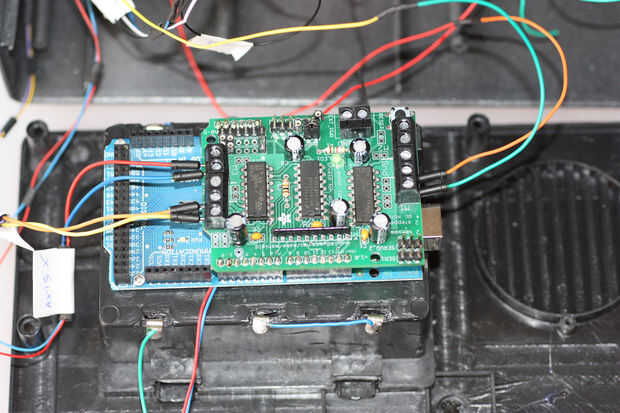
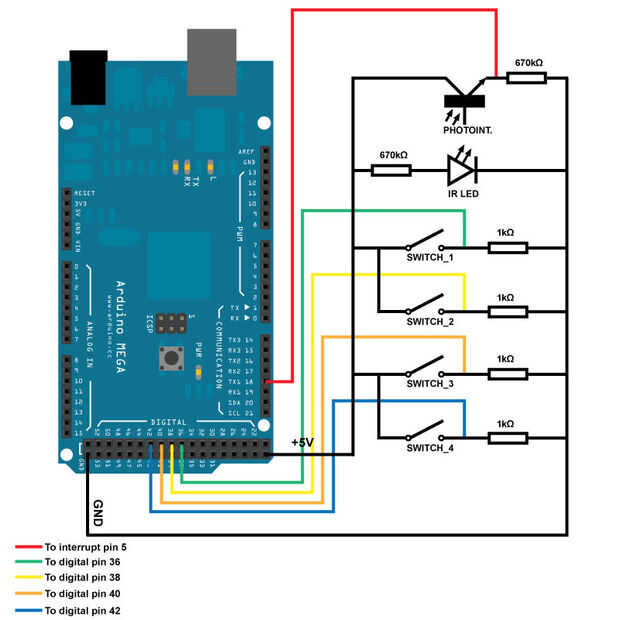
Tomar algunos cables de puente, corte y despojarlos. A continuación cortar los cables etiquetados les tira demasiado, conecte un alambre puente a cada uno y fijar con el tubo del encogimiento. Ahora Conecte los cables del motor del regulador del motor y el resto de los cables como se muestra en el diagrama (cuadro 19).








")




")