Paso 8: Código Final

Una vez efectuada la calibración, subir el código a continuación.
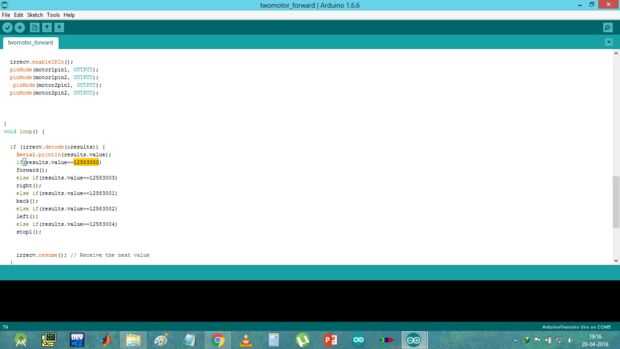
Ir a la función de bucle y sustituir los valores que previamente guardaste en el paso TSOP. (marcados en amarillo en la imagen).
Trae su control remoto y presiona los botones respetados cuyos valores usted acaba de entrar en el código.
El robot debe moverse en la dirección deseada.
Ahora sólo tiene que conectar otra batería para el Arduino usando una 2,1 mm snap batería portátil para el Bot.
Mira mi VIdeo en Youtube para más información sobre este proyecto.
Para cualquier problemas, no dude en dejar un comentario.
Gracias.












")
