Paso 10: El código
Descargar y abrir el IDE de Arduino desde http://arduino.cc/en/Main/Software
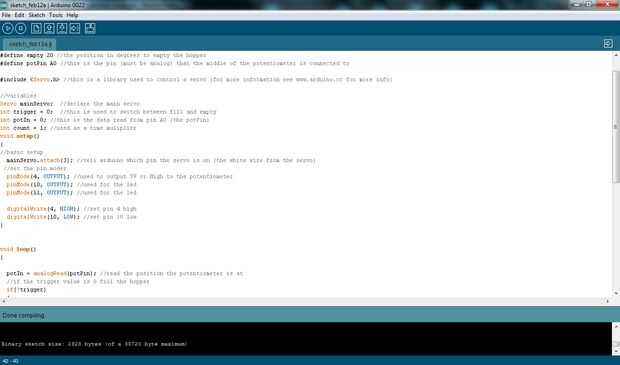
Copie y pegue el código siguiente:
PRINCIPIOS DEL CÓDIGO #include < Servo.h > //this es una biblioteca que se utiliza para controlar un servo (para más información véase www.arduino.cc para obtener más información) variables
Autor: Shane Halse
Correo electrónico: ShaneHalse
Fecha: 11/02/2011
#define llenar 155 //the posición en grados para llenar la tolva
#define vacio //the 20 posición en grados para vaciar la tolva
#define potPin A0 //this es el pin (debe ser analógico) que la media del potenciómetro se conecta a
Servo mainServo; declarar el servo principal
gatillo de int = 0; se utiliza para cambiar entre llenar y vaciar
potIn int = 0; Esta es la lectura de datos del pin A0 (potPin)
int cuenta = 1; utilizado como un muliplier de tiempo
void setup()
{
configuración básica
mainServo.attach(3); Dile arduino que prender el servo está en (el cable blanco del servo)
establecer los modos de pin
pinMode (4, salida); utilizado para la salida de 5 v o alta el potenciómetro
pinMode (10, salida); utilizado para el led
pinMode (11, salida); utilizado para el led
digitalWrite (4, alto); configurar pin 4 alta
digitalWrite (10, bajo); configurar pin 10 bajo
}
void loop()
{
potIn = analogRead(potPin); leer la posición en que del potenciómetro está
Si el valor configurado es 0 llene la tolva
if(!trigger)
{
mainServo.write (relleno); //move servo para llenar la posición
se utiliza para configurar el retardo de
cuenta = //uncomment 171 esto para establecer el retraso máximo en 3 horas
la demora a continuación se calcula usando potin (que puede ser 0-1024) como delayinseconds ~ = 0 - 64 segundos
para (; cuenta > = 0; count--)
{
para (; potIn > 0; potIn = potIn-20)
{
Esto es para hacer el LED flash cada 100 milisegundos de potIn
digitalWrite(11,HIGH); conjunto sobre
Delay(100+potIn);
digitalWrite(11,LOW); conjunto led apagado
Delay(100+potIn);
}
}
cuenta = 1;
disparo = 1; cambiar gatillo 1 configuración vacía
digitalWrite(11,LOW); conjunto led apagado
}
if(trigger) más
{
mainServo.write(empty); Ponga el servo en posición vacía
Delay(1000); perder servo establece posición
disparo = 0; cambiar gatillo a 0 para llenar el programa de instalación
}
}
FINAL DEL CÓDIGO DE
Conectar el Arduino al ordenador
Haga clic en el botón de compilación
Cargar el código compilado en el tablero y debe empezar a trabajar automáticamente
Puede montar la unidad en la pared, coloque un recipiente debajo de la unidad y deje que la diversión ensue!
* Notas * - Si desea que puede agregar que algunos tipo de botón su perro presiona para conseguir un tratamiento en lugar de esperar y sólo habrá hecho la famosa caja de Skinner.











")

