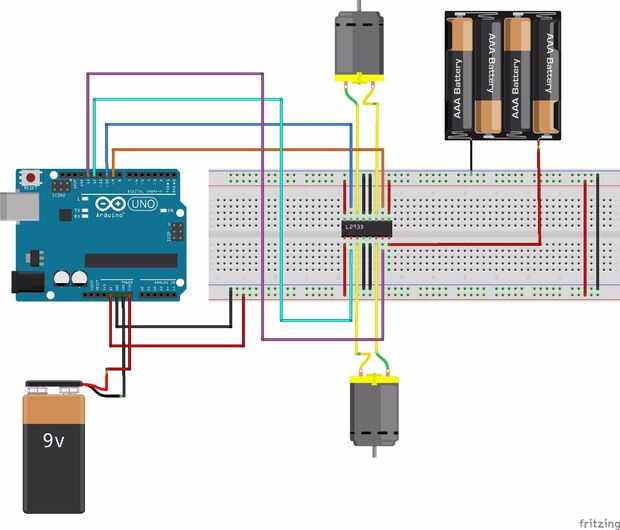
Paso 2: Cableado del Chip L293D
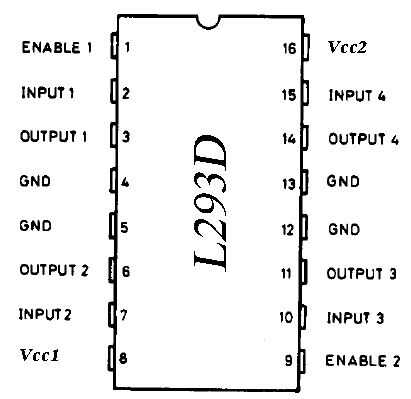
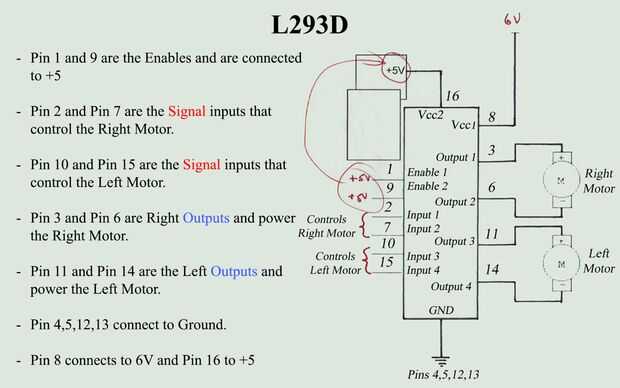
Pin 4 y Pin 5, Pin 12 Pin 13 de Chip L293D conectan a masa (negativo en protoboard)
Pin 1, Pin 9 y Pin 16 de Chip L293D conectan a 5 voltios (positivo en protoboard)
Pin 8 de Chip L293D se conecta a 6 voltios (positivo de la batería)
PIN 3 del Chip L293D se conecta al Motor adecuado
PIN 6 del Chip L293D se conecta al Motor adecuado
PIN 11 del Chip L293D se conecta al Motor izquierdo
PIN 14 de Chip L293D se conecta al Motor izquierdo
Salida de pasadores en Arduino para controlar Motor de derecho:
Pin 2 del Chip L293D se conecta al Pin de salida de Arduino
PIN 7 del Chip L293D se conecta al Pin de salida de Arduino
Salida de los pernos en Arduino para controlar el Motor de izquierda:
PIN 10 del Chip L293D se conecta al Pin de salida de Arduino
PIN 15 de Chip L293D se conecta al Pin de salida de Arduino

")










 de acceso")
