Paso 3: Juntándolo todo

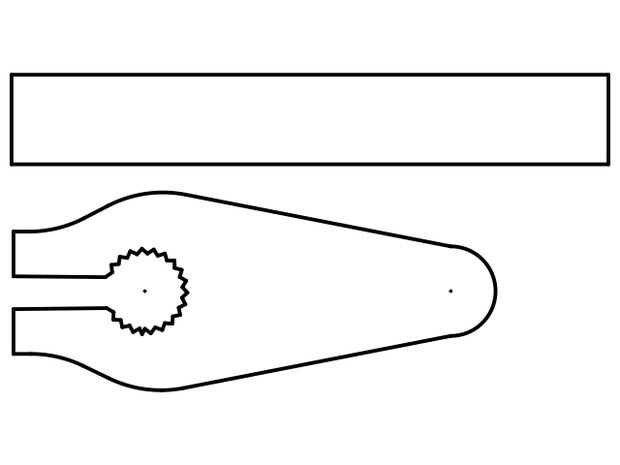
Cortar 6 pedazos de brazos de servo de archivo servo_arm.dxf. Agujero de taladro en extremo con la dimensión correcta para poder atornillar allí Tuerca Perno de la rótula. En el otro lado taladro a través del brazo, lugar allí la tuerca perno utilizado para la fijación en el servo. Esto puede verse en una imagen proporcionada.
Coloque los servos en posición cero (longitud del pulso de 1500us), a continuación, coloque los brazos en posición horizontal, apretar el tornillo. Ahora es la plataforma completa y lista para usarse.
En códigos fuente, archivo platform.ino, este es el programa principal para el Arduino. Aquí tienes que cambiar algunas variables con respecto a la plataforma construida. Muchas variables aparecen en una imagen.
Define de MIN y MAX - min y valores máximos de longitud del pulso del servo
[cero] - longitudes de pulso en el que los brazos están en posición completamente horizontal
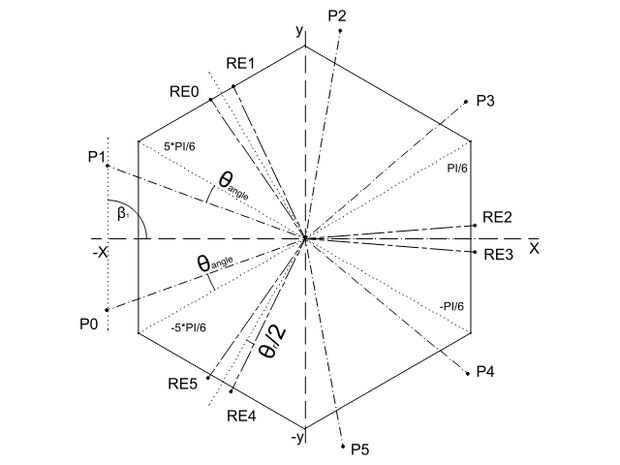
[beta] - ángulo entre x eje y servo del brazo
servo_min, servo_max - ángulo del brazo del servo en la posición max y min
servo_mult - los valores son de documentación técnica de servo, la longitud del pulso y el ángulo resultante de la rotación correspondiente a esta longitud de pulso
L1 - longitud del brazo de servo (de la Junta de rótula de servo rotación punto - centro del eje al centro del punto de conexión -). En pulgadas
L2 - conexión longitud de las piernas, en pulgadas
z_home - altura de plataforma móvil sobre la base, la distancia entre el brazo del servo y plataforma.
PD, theta_p, RD, theta_r valores - pueden verse en fotos anteriores y en este paso.
las ecuaciones para x y puntos de posición y de rotación del servo en la base y plataforma de enganche, tienen que ser specificall calculado con respecto a la orientación deseada del eje x. Es sólo básica goniometría, siempre imagen puede ayudar a entender estas ecuaciones.










")


