Paso 17: Configuración de Repetier Firmware para Arduino Mega 2560
Repetier o Firmware de Marlin para Arduino Mega implementar G2 una interpolación circular G3 para que son buenos para CNC e impresión 3D. Sin embargo tienen limitaciones en puras instrucciones de CNC como picoteando un GCode.
Descargar e instalar el IDE de Arduino aquí: http://arduino.cc/en/main/software
Descarga y Repetier Firmware aquí: http://www.repetier.com/download/
Configurar el Repetier Firmware para funciones CNC:
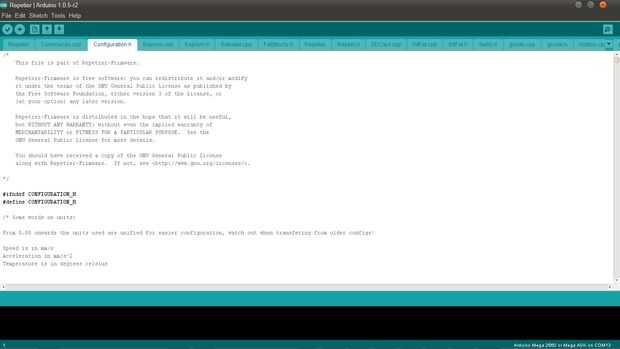
Después de instalar el IDE de Arduino, abrirlo y usarlo para abrir el Repetier Firmware tienes a descargar (archivo repetier.ino).
-Herramientas del IDE de Arduino tabulación:
SelectBoard - Arduino Megra 2560 o MEGA ADK
- Desplácese hasta el archivo Configuration.h y modificar las siguientes líneas:
#define NUM_EXTRUDER 0
#define Motherboard, Tarjeta madre 33
#define XAXIS_STEPS_PER_MM 128
#define YAXIS_STEPS_PER_MM 128
#define ZAXIS_STEPS_PER_MM 2560
#define falso HAVE_HEATED_BED
#define falso ENDSTOP_PULLUP_X_MIN
#define falso ENDSTOP_PULLUP_Y_MIN
#define falso ENDSTOP_PULLUP_Z_MIN
#define falso ENDSTOP_PULLUP_X_MAX
#define falso ENDSTOP_PULLUP_Y_MAX
#define falso ENDSTOP_PULLUP_Z_MAX
#define falso ENDSTOP_X_MIN_INVERTING
#define falso ENDSTOP_Y_MIN_INVERTING
#define falso ENDSTOP_Z_MIN_INVERTING
#define falso ENDSTOP_X_MAX_INVERTING
#define falso ENDSTOP_Y_MAX_INVERTING
#define verdadero ENDSTOP_Z_MAX_INVERTING
#define verdadero MIN_HARDWARE_ENDSTOP_X
#define verdadero MIN_HARDWARE_ENDSTOP_Y
#define verdadero MIN_HARDWARE_ENDSTOP_Z
#define verdadero MAX_HARDWARE_ENDSTOP_X
#define verdadero MAX_HARDWARE_ENDSTOP_Y
#define verdadero MAX_HARDWARE_ENDSTOP_Z
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
#define max_software_endstop_x true
#define max_software_endstop_y true
#define max_software_endstop_z true
#define ENDSTOP_X_BACK_MOVE 5
#define ENDSTOP_Y_BACK_MOVE 5
#define ENDSTOP_Z_BACK_MOVE 0
#define ENDSTOP_Y_RETEST_REDUCTION_FACTOR 2
#define ENDSTOP_Z_RETEST_REDUCTION_FACTOR 2
#define verdadero ALWAYS_CHECK_ENDSTOPS
#define X_MAX_LENGTH 500
#define Y_MAX_LENGTH 700
#define Z_MAX_LENGTH 200
#define MAX_FEEDRATE_X 200
#define MAX_FEEDRATE_Y 200
#define MAX_FEEDRATE_Z 5
#define HOMING_FEEDRATE_X 80
#define HOMING_FEEDRATE_Y 80
#define HOMING_FEEDRATE_Z 3
#define MAX_ACCELERATION_UNITS_PER_SQ_SECOND_X 1500
#define MAX_ACCELERATION_UNITS_PER_SQ_SECOND_Y 1500
#define MAX_ACCELERATION_UNITS_PER_SQ_SECOND_Z 100
#define MAX_TRAVEL_ACCELERATION_UNITS_PER_SQ_SECOND_X 3000
#define MAX_TRAVEL_ACCELERATION_UNITS_PER_SQ_SECOND_Y 3000
#define MAX_TRAVEL_ACCELERATION_UNITS_PER_SQ_SECOND_Z 100
Configurar el Repetier Firmware para funcionalidad de impresión 3D:
#define NUM_EXTRUDER 1
#define EXT0_STEPS_PER_MM 413
#define verdadero HAVE_HEATED_BED / / si ture o bien falso
")











