Paso 10: Paso 9 (cuarta conexión)
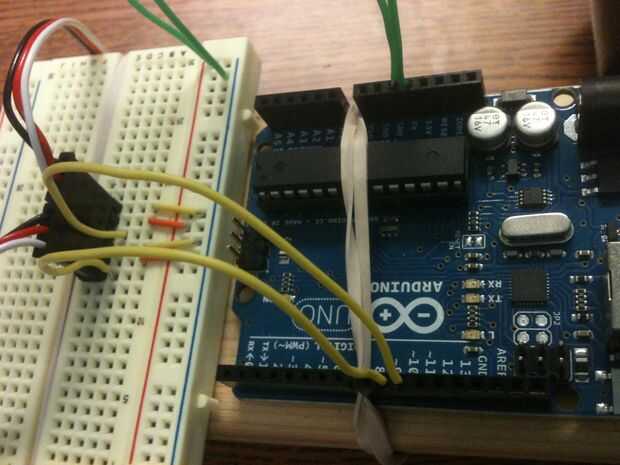
Asegúrese de que la conexión del cable blanco en el servo es fueron los pernos en el Arduino.
Casi listo... COMPROBAR LAS CONEXIONES!!! ;)
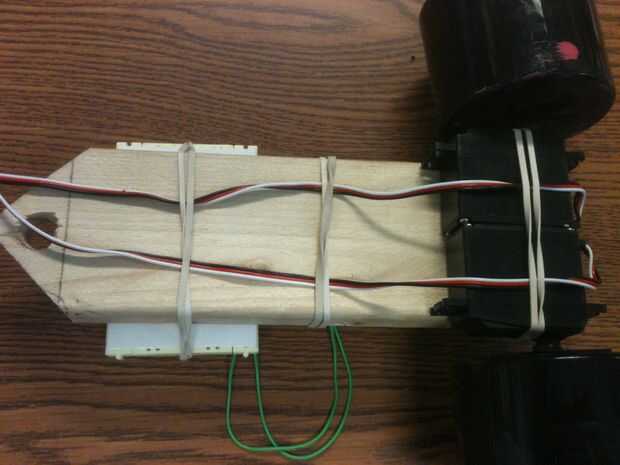
Como veis en la segunda foto he ejecutar los cables bajo el Drawbot hacer todo limpio y organizado. ;)
")











")
