Paso 1: Módulo de principal
Directamente es el sensor de ultrasonidos URM37 de DFRobot (ethernet cable es utilizado como cable de extensión). El URM37 se utiliza en el modo TTL, necesita tan sólo son 4 hilos (2 para alimentación) + 2 para datos
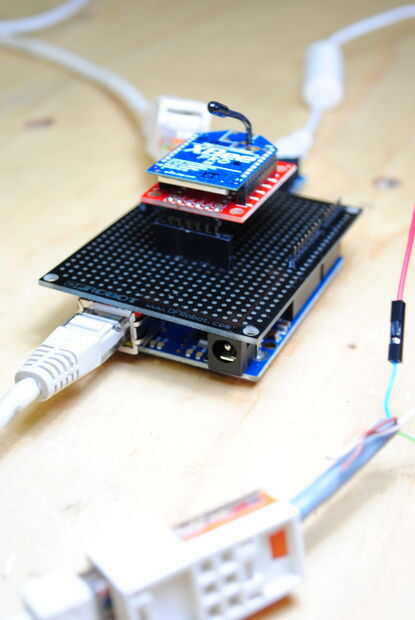
También en el tablero principal es el XBee Explorer (https://www.sparkfun.com/products/9132), que se encarga de la 3.3 conversión de 5V y recibe los datos desde el sensor inalámbrico.







![Mostrar datos en un sitio web - olla electrónica [Arduino Nano + Ethernet Shield]](https://foto.askix.com/thumb/170x110/6/5d/65d8cdd6f7835b48d99fa83b376b85ec.jpg "Mostrar datos en un sitio web - olla electrónica [Arduino Nano + Ethernet Shield]")




")
