
¿Qué es un GPS o GLONASS?
Una unidad de seguimiento de GPS es un dispositivo, normalmente llevado por un vehículo móvil o persona, que utiliza el sistema de posicionamiento Global para determinar y rastrear su ubicación exacta, y por lo tanto de su portador, a intervalos. Los datos de localización grabadas pueden almacenarse dentro de la unidad de seguimiento, o puede ser transmitida a unas datos de ubicación base o conectados a Internet el ordenador, usando un celular (GPRS o SMS), radio o módem por satélite integrado en la unidad. Datos de seguimiento de software están disponibles para smartphones con capacidad de GPS.
El sistema de posicionamiento Global (GPS) es un sistema de navegación por satélite formado por una red de 24 satélites colocados en órbita por el Departamento de defensa de Estados Unidos. GPS fue pensado originalmente para aplicaciones militares, pero en la década de 1980, el gobierno hizo el sistema disponible para uso civil. GPS trabaja en cualquier condición climática, en todo el mundo, 24 horas al día. No hay cuotas de suscripción ni cargos de instalación a utilizar el GPS.
Arquitectura de la unidad de seguimiento del GPS:
Un localizador GPS esencialmente contiene un módulo GPS para recibir la señal GPS y calcular las coordenadas. Para registradores de datos que contiene gran cantidad de memoria para almacenar las coordenadas, empujadores de datos además contiene el módem GSM/GPRS para transmitir esta información a un ordenador central a través de SMS o vía GPRS en forma de paquetes IP. El diagrama muestra una arquitectura de hardware de un avanzado GPS tracker.
Proyecto:
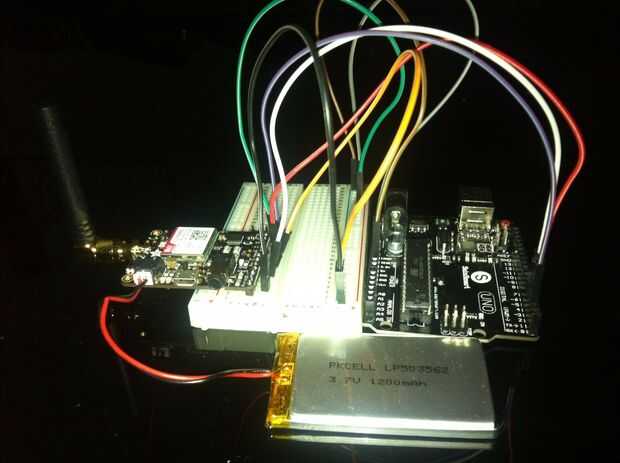
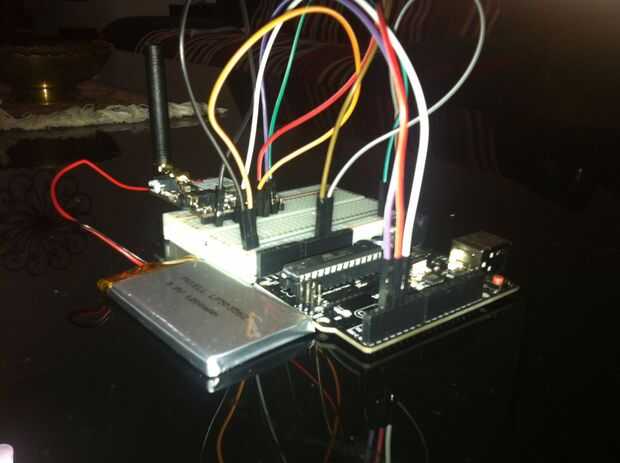
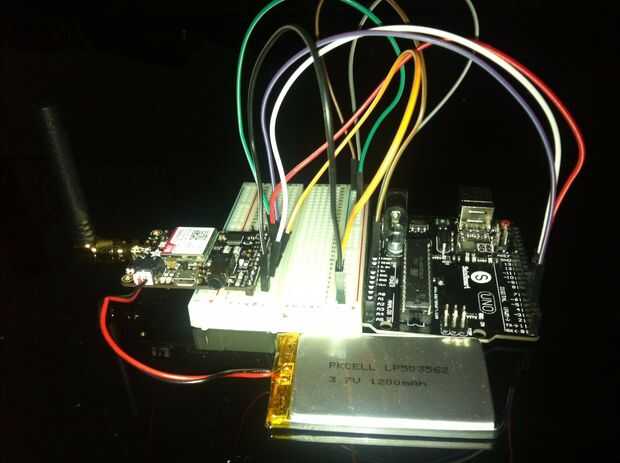
Adafruit FONA 808 es un asombroso poco breakout que integra no sólo un chip GSM/GPRS, pero también un GPS en el mismo tablero.
Hoy voy a usar el FONA 808 breakout junto con Arduino para hacer un fresco proyecto de seguimiento. Este proyecto puede utilizarse por ejemplo en objetos que no quiere ir después de una distancia dada. Por ejemplo, podría colocar este proyecto en una bicicleta y sabe inmediatamente si ha sido robado. Así que básicamente nos dará parámetros del límite.
Que usando un sistema de alarma a bordo simple, compuesto por un LED y un zumbador piezoeléctrico, a cuando el límite ha sido violado. Entonces, usaremos IO Adafruit para rastrear la ubicación del proyecto en tiempo real y sabe inmediatamente si el límite ha sido violado desde el dashboard de Adafruit IO.





")




")


