Paso 9: Programación y Algoritma
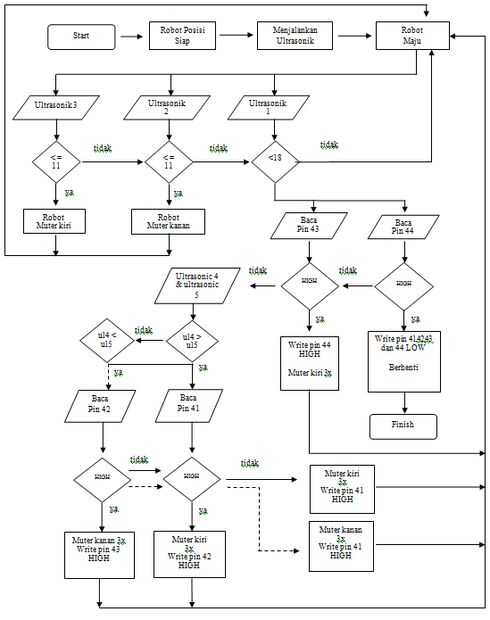

Este el flujo del programa:
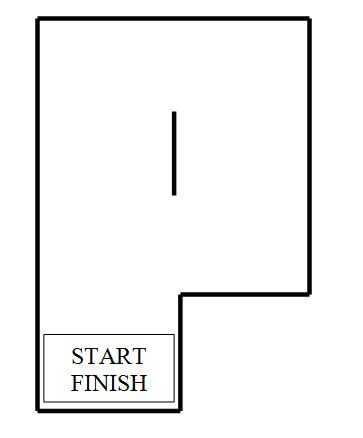
- # primero encenderse, el robot hacer "Stanby Pose" por 3 segundos
# Programa ultrasonidos se ejecuta para recopilar datos
# Función Foward corre como función predeterminada
# Todo indicador LED se apagará
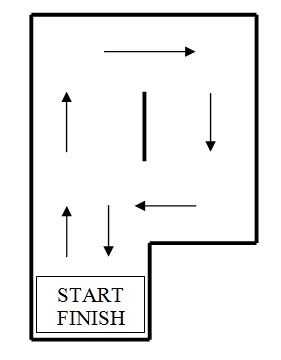
# 1 º, 2 º y 3 º ultrasonidos está recogiendo datos
# Robot sigue avanzando hasta ultrasonidos 1 º, 2 º y 3 º leído gama < 11 cm - # al 2 º lectura ultrasónico ultrasónico o 3er rango < 11 cm
# significa robot en estado de no derecho
# robot girará a la derecha, 1 paso cuando lea gama < 11 cm en 2do ultrasonido
robot # se gire a la izquierda, 1 paso cuando lea gama < 11 cm en 3 º de ultrasonido
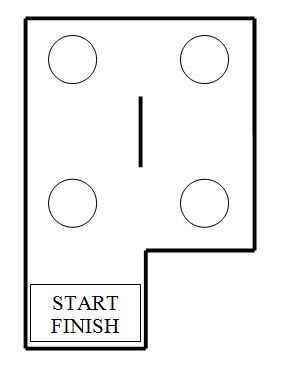
# Cuando el estado del robot es recta, delante de la función se ejecuta como función predeterminada - # al robot Lea el 1 º puesto (hay pared en frente del robot)
# Robot leer datos de ultrasonidos de 4 º y 5 º
# robot girará a la derecha, paso 3 cuando lea gama < 11 cm en 4 ultrasonidos, luego encienda el LED 1
robot # se gire a la izquierda, paso 3 cuando lea gama < 11 cm en 5 ultrasonidos, entonces encender el LED 1
# Robot funciona algoritma de 1ª y 2ª (sin pose de stanby)
# Cuando robot lee el 2 º punto de control
# Robot leer datos de ultrasonidos de 4 º y 5 º
# robot girará a la derecha, paso 3 cuando lea gama < 11 cm en 4 ultrasonidos, luego encienda el LED 2
robot # se gire a la izquierda, paso 3 cuando lea gama < 11 cm en 5 ultrasonidos, luego encienda el LED 2
# Robot funciona algoritma de 1ª y 2ª (sin pose de stanby
# Cuando robot Lee 3er Checkpoint
# Robot leer datos de ultrasonidos de 4 º y 5 º
# robot girará a la derecha, paso 3 cuando lea gama < 11 cm en ultrasonido 4, luego 3 LED se encienda
robot # se gire a la izquierda, paso 3 cuando lea gama < 11 cm en 5 ultrasonidos, entonces enciende LED 3
# Robot funciona algoritma de 1ª y 2ª (sin pose de stanby)
# Cuando robot lee el 4 º puesto
# Robot leer datos de ultrasonidos de 4 º y 5 º
# Robot Lea 3 LEDs en estado alto y gire a la izquierda paso 3 luego encender 4 LED
# Robot funciona algoritma de 1ª y 2ª (sin pose de stanby)
# al robot Lea allí es una pared delante del robot
# Robot Lea todo indicador en estado alto, que sea el robot final
# Pose espera robot durante 10 segundos
")
")
")







. ¿")


