Paso 2: Construcción del chasis...

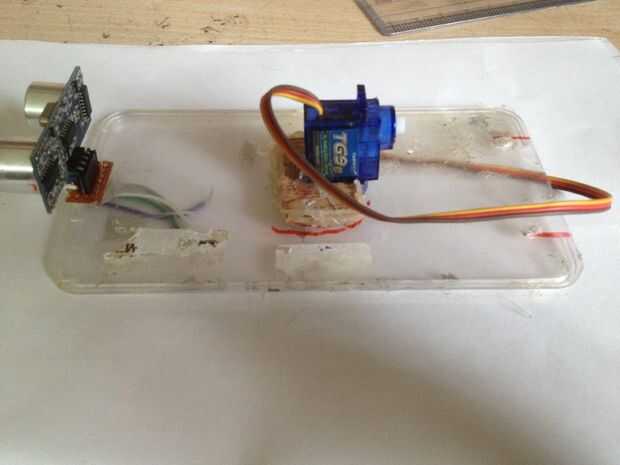
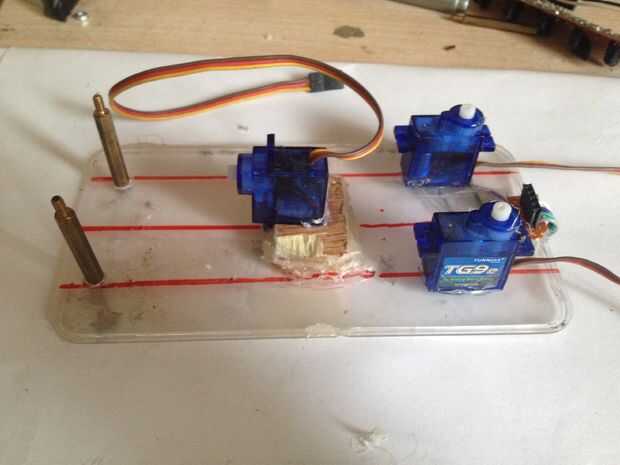













Comience por dibujar un bosquejo áspero de donde desea colocar los servos en el cuerpo del hexápodo. Esto dependerá de muchos factores como donde lo desea colocar la electrónica, dimensiones del cuerpo, etc..
No entraré en medidas específicas ya que cada costumbre de chasis será la misma pero hace que se adhieren a estos puntos básicos:
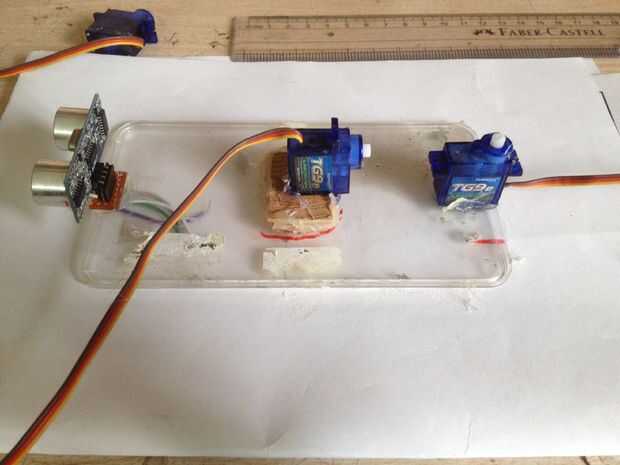
- El servo que se inclina el hexápodo está situado en el centro de masa del robot.
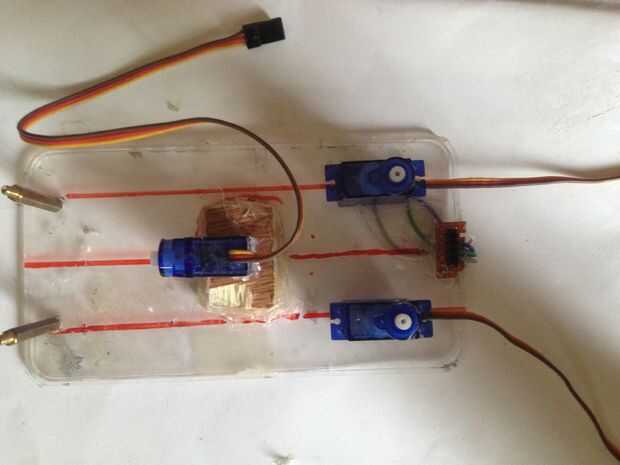
- Asegúrese de que usted es consciente del peso de que cada servo puede llevar.
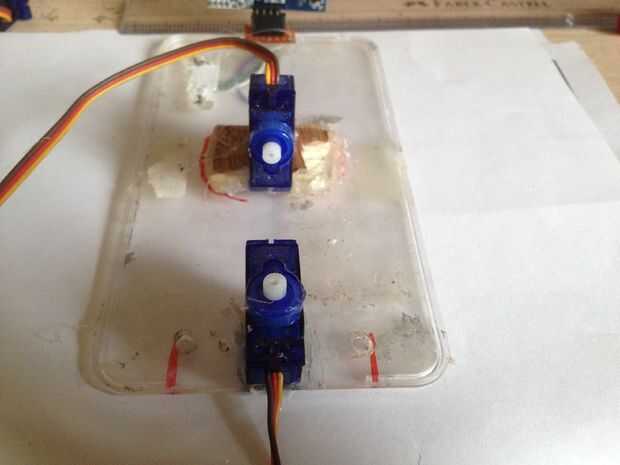
- Alinear correctamente las piernas derecha e izquierdas
- Hacer las piernas para el servo en el centro un poco más corto que las piernas... Esto facilita inclinar el hexápodo.
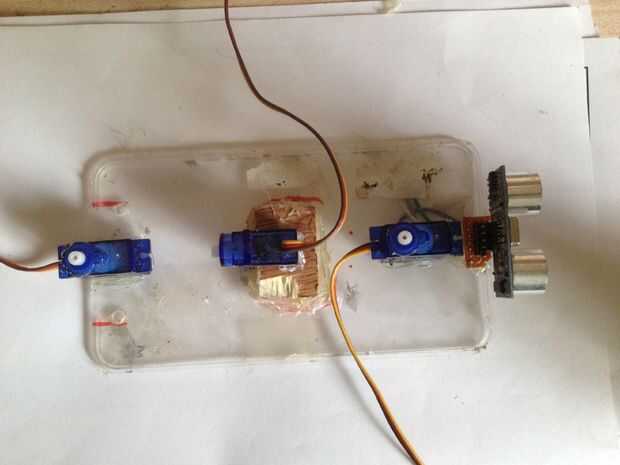
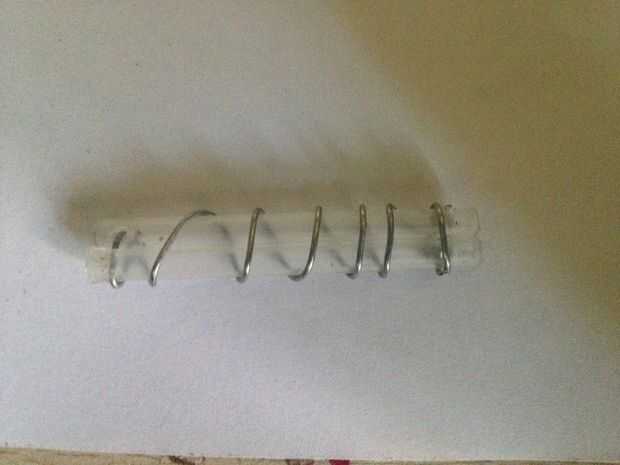
Empieza por tomar 2 tubos de relleno de pluma y hacer agujeros a través de ellos. Aquí es donde el alambre de metal se atraviesan y mantenerlos juntos para dar un fuerte apoyo para las piernas.
Luego tuerza el alambre hasta el extremo de los tubos y cubre las piernas con cinta adhesiva negra. La cinta negra da las piernas un aspecto de fibra de carbono... tipo bien apagado. Ahora es el momento para conectar la pata a la pieza de mechanno utilizando pegamento caliente. (Las imágenes servirá como una guía mejor: p)
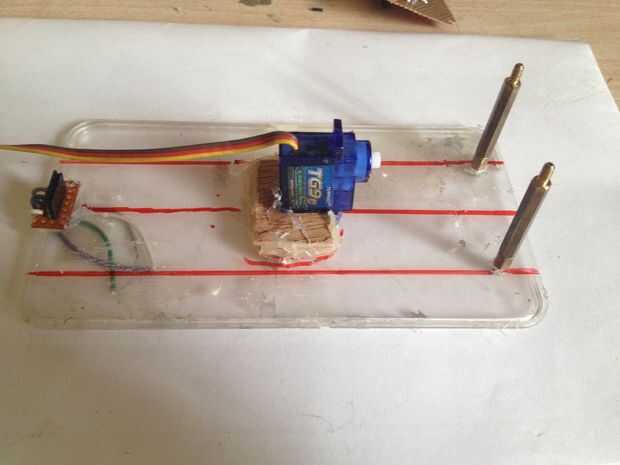
Repita estos pasos para todas las piernas... He incluido fotos de todas las piezas de la pierna completa.
Una vez que tengas todas las patas hechas de conectarlos a los cuernos de servo con algún pegamento y tornillos.
Ahora a conectar la cabeza...

")
")




. ¿")





