Paso 3: Hacer la cabeza...








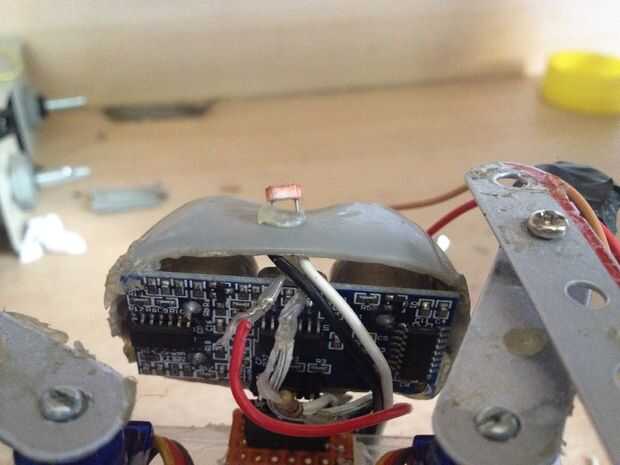
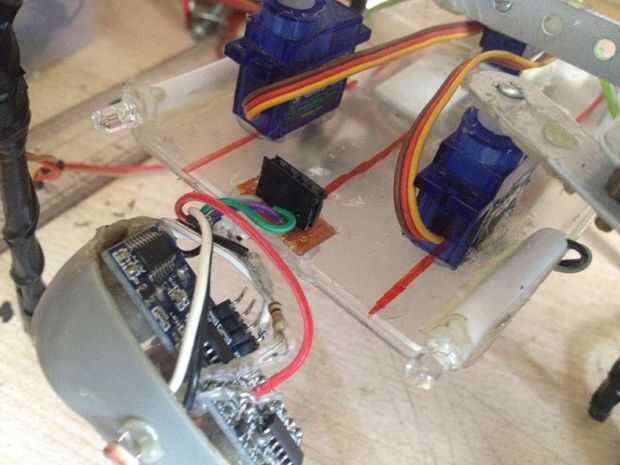
Para la cabeza he utilizado un sensor de distancia ultrasonido HC SR04... Esto se encuentra en una cáscara poco ingeniosa podrido de un viejo soplete... hace la cabeza un poco ver como cabeza de Wall-E. : D
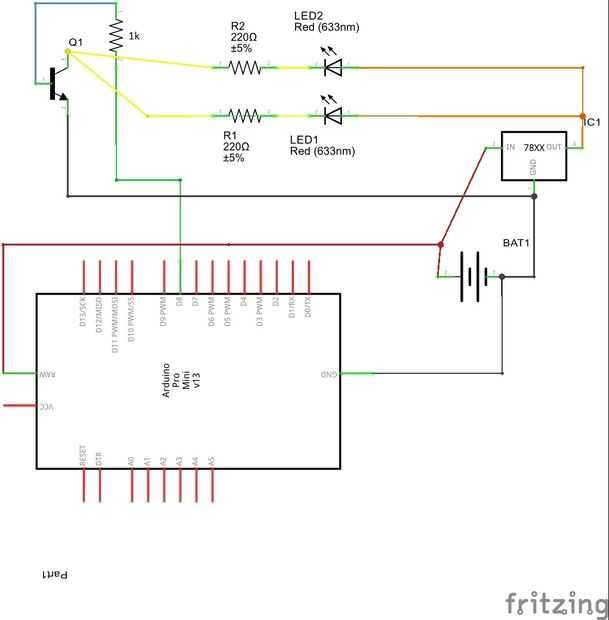
También he añadido una luz de fondo azul a la cabeza... hace que el robot se vea un poco más vivo!
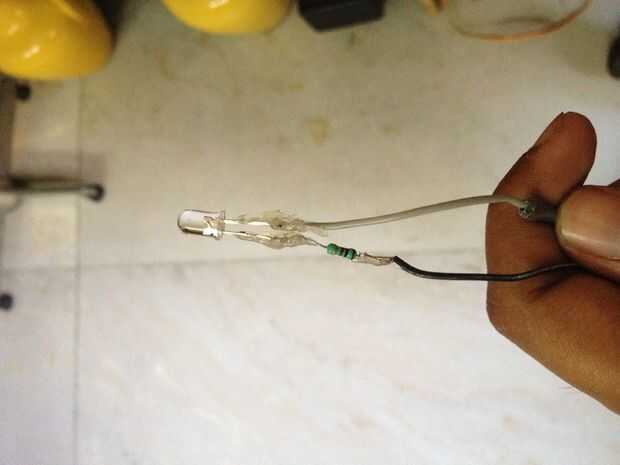
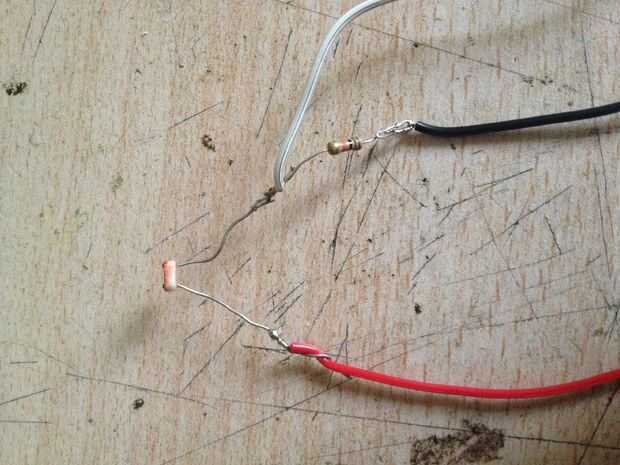
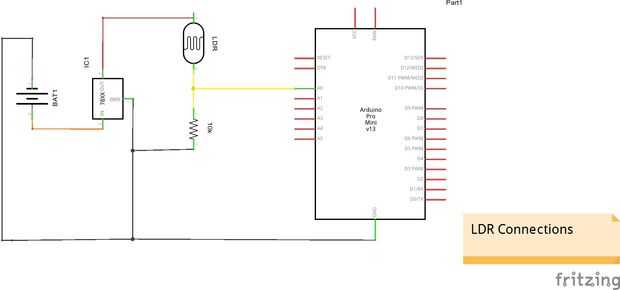
También hay un LDR en la parte superior de la cabeza para medir la intensidad de la luz de los alrededores... y también una manera para que el robot saber cuando su ser acariciados. : D
Otra vez voy a dejar que las imágenes hacer el explica...

")
")




. ¿")





